

Il tatto robotico sembra un dettaglio finché il pezzo non scivola. Poi diventa il centro del problema. Una camera può dire dove si trova un oggetto; non sempre può dire quanta forza sta subendo, se sta deformando, se sta scivolando o se la presa è ancora sicura.
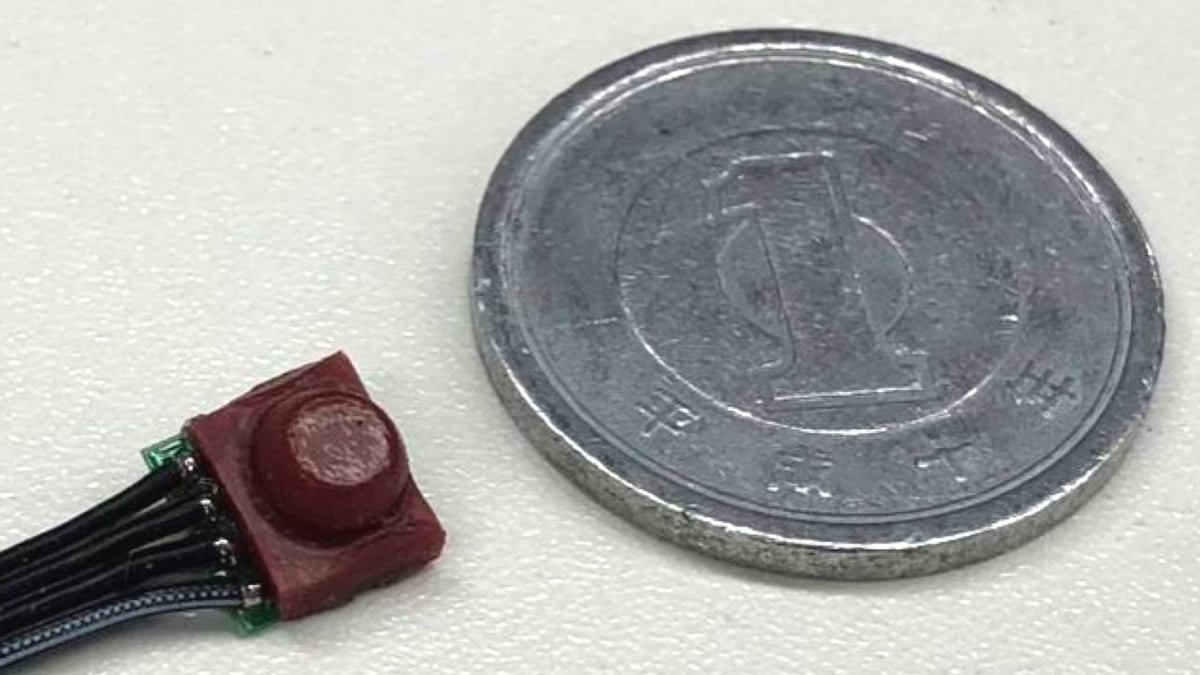
XELA Robotics presenterà al Robotics Summit & Expo 2026 di Boston nuove dimostrazioni di sensing tattile. Secondo The Robot Report, l'azienda mostrerà una punta robotica con unghia sensibile a sei assi, l'integrazione uSkin nell'Universal Manipulation Interface, compensazione delle interferenze magnetiche e capacità migliorate per afferrare oggetti fragili.
Perché una carta sottile è un test serio
Il demo più visivo è il dito robotico che solleva una carta. Sembra una scena piccola, quasi da laboratorio. In realtà contiene una difficoltà industriale: oggetti sottili, superfici lisce, margini minimi e contatto difficile da stimare.
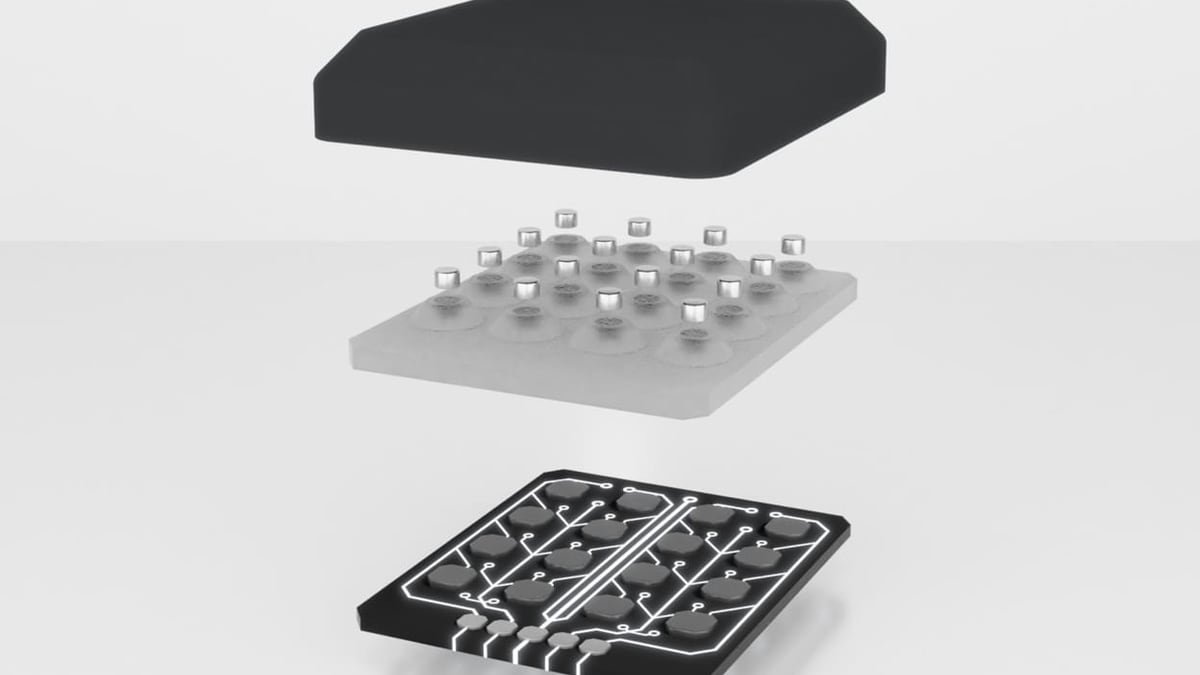
XELA spiega sul proprio sito che i sensori uSkin misurano pressione e forze di taglio, mentre il software uAi visualizza il contatto, individua i punti di pressione e registra dati tattili in tempo reale. È la differenza tra chiudere un gripper "abbastanza" e sapere se la presa sta andando nella direzione corretta.
Visione e tatto non sono concorrenti
Nel picking industriale la visione resta essenziale: localizza il pezzo, stima la posa, individua ostacoli. Ma appena il gripper tocca l'oggetto, la telecamera vede meno. La presa diventa fisica. Qui il tatto aggiunge un canale che può distinguere tra contatto, compressione, slittamento e deformazione.
Questo conta per alimentare, packaging, componenti piccoli, materiale deformabile e assemblaggio. Un cobot come Dobot CR5 può essere preciso, ma il valore finale dipende da end-effector, sensori, fixture e logica di controllo. Nelle applicazioni di assemblaggio o scarico e carico, il gripper non è un accessorio: è il punto in cui la variabilità entra nella cella.
Il dato tattile cambia anche la qualità
Se un sensore tattile registra cosa è successo durante la presa, la fabbrica guadagna tracciabilità. Si può capire se un pezzo è stato compresso troppo, se una presa instabile precede gli scarti, se un lotto richiede parametri diversi o se un utensile sta degradando.
Il tema della compensazione magnetica citato da XELA è particolarmente interessante per i reparti metallici. Magneti, componenti ferromagnetici e utensili vicini possono disturbare la misura. Se il sensore vuole lavorare in fabbrica, non può pretendere un laboratorio pulito intorno a sé.
Cosa guardare nei prossimi mesi
Il tatto robotico diventerà davvero industriale quando sarà facile da integrare, robusto da mantenere e utile nei dati. Non basta avere una lettura bella in dashboard. Serve che il segnale migliori il ciclo: meno scarti, meno retry, meno pezzi caduti, setup più rapido, cambio formato più stabile.
Per questo le demo al Robotics Summit sono rilevanti ma vanno lette con prudenza. La carta, l'uovo di quaglia o l'origami mostrano sensibilità. La domanda successiva è quanto velocemente la stessa tecnologia si configura su pezzi reali, con polvere, olio, tolleranze e operatori che cambiano turno.
Conclusione
XELA non sta solo mostrando un dito robotico più sofisticato. Sta ricordando che la physical AI non vive solo di visione e linguaggio: vive di contatto.
Per una PMI manifatturiera, il messaggio è operativo. Se il processo fallisce nel momento della presa, non basta cambiare braccio o aumentare la forza. Bisogna misurare il contatto. Il robot che sente meglio non è più umano; è più verificabile.
Fonti
- The Robot Report, XELA Robotics to show tactile sensing at the 2026 Robotics Summit & Expo
- XELA Robotics, Physical AI with a Human Touch
- XELA Robotics, Technology
Articoli correlati
Vedi tutti →
Mani robotiche 2026: la destrezza diventa il vero collo di bottiglia
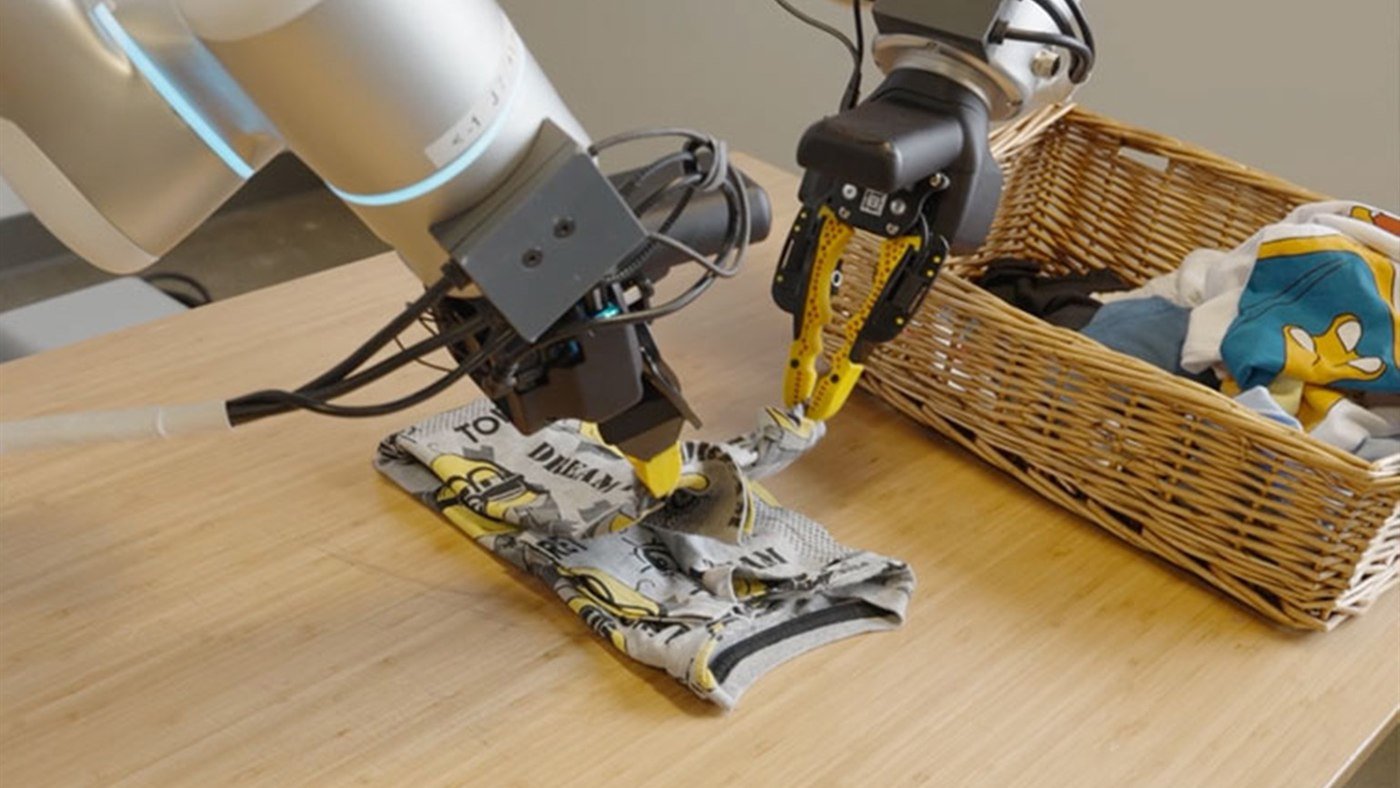
Il robot che piega magliette parla di dati umani
Robot open source: perché LeRobot può accelerare la robotica fisica
Serve supporto per applicare queste idee?
Il team Bubbles Technology progetta soluzioni robotiche su misura per PMI in Campania e in tutta Italia. Prenota una consulenza gratuita per discutere esigenze, ROI e roadmap.