Unitree G1
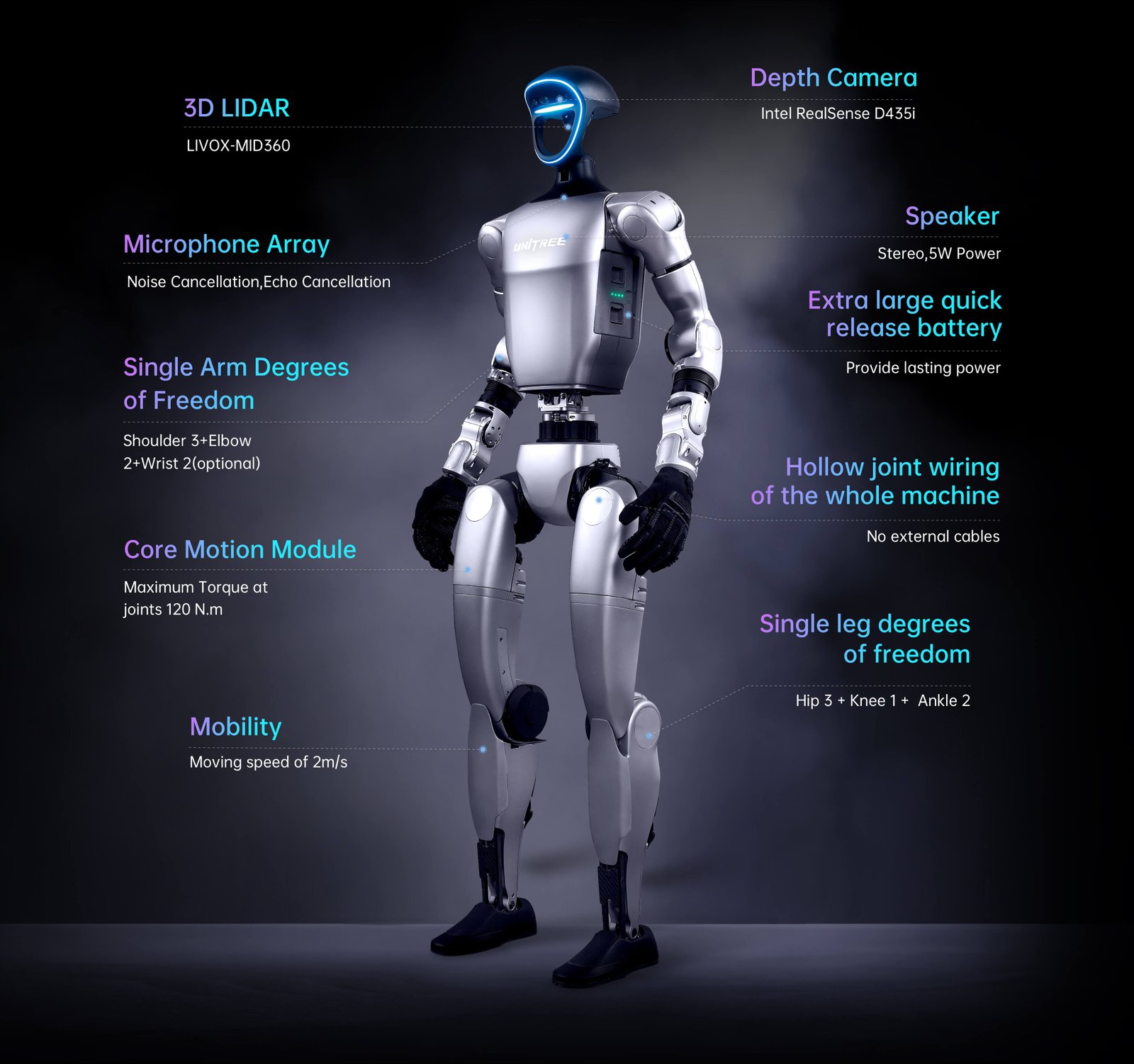
Umanoide compatto con 23-43 DOF, percezione 3D e batteria smart. La versione EDU apre scenari su manipolazione, teleoperazione e workflow di physical AI con Jetson Orin e mano Dex3-1.
Visione 3D, audio e controllo coppia
G1 integra Depth Camera + 3D LiDAR, array microfoni e cooling locale per continuità operativa. Cablaggio hollow routing in ogni giunto per ordine e affidabilità.

Mappa e interazione ambientale
Il nostro G1 all'opera
Movimento naturale, manipolazione e autonomia
Manipolazione
Braccia a 5 DoF, mano Dex3‑1 opzionale
Locomozione
6 DoF per gamba, ampio spazio di movimento
Dimostrazione
Footage hero: mobilità e postura
G1 in Dettaglio
Dettagli visivi per struttura, mobilità e configurazioni EDU





Specifiche Tecniche
Specifiche principali per confrontare G1 e G1 EDU in base a mobilità, computing e accessori.
| Dimensioni meccaniche | ||
| Altezza x Larghezza x Spessore (stand) | 1320 × 450 × 200 mm | 1320 × 450 × 200 mm |
| Altezza x Larghezza x Spessore (fold) | 690 × 450 × 300 mm | 690 × 450 × 300 mm |
| Peso (con batteria) | ~35 kg | ~35 kg+ |
| Gradi di libertà totali | 23 | 23 – 43 |
| DOF singola gamba | 6 | 6 |
| DOF vita | 1 | 1 (+2 opzionali) |
| DOF singolo braccio | 5 | 5 |
| DOF singola mano | — | 7 (Dex3‑1) + 2 polso opz. |
| Mano Dex3‑1 | — | Pollice 3 DOF, Indice 2 DOF, Medio 2 DOF; sensori tattili opzionali |
| Cuscinetti giunto | Rulli incrociati industriali (alta precisione e carico) | |
| Motore giunto | PMSM rotore interno a bassa inerzia, alta velocità | |
| Coppia massima ginocchio [1] | 90 N·m | 120 N·m |
| Carico massimo braccio [2] | ~2 kg | ~3 kg |
| Lunghezza polpaccio + coscia | 0,6 m | 0,6 m |
| Apertura braccia | ~0,45 m | ~0,45 m |
| Spazio movimento giunti (principali) | Vita Z ±155° • Ginocchio 0~165° • Anca P ±154°, R −30~+170°, Y ±158° | Vita Z ±155°, X ±45°, Y ±30° • Ginocchio 0~165° • Anca P ±154°, R −30~+170°, Y ±158° • Polso P ±92.5°, Y ±92.5° |
| Caratteristiche elettriche | ||
| Cablaggio hollow nei giunti | Sì | Sì |
| Encoder giunto | Doppio encoder | Doppio encoder |
| Raffreddamento | Aria locale | Aria locale |
| Alimentazione | Batteria 13S | Batteria 13S |
| Computazione di base | CPU 8‑core | CPU 8‑core |
| Sensori | Depth Camera + 3D LiDAR | Depth Camera + 3D LiDAR |
| Array microfoni (4) | Sì | Sì |
| Speaker 5W | Sì | Sì |
| Wi‑Fi 6 / BT 5.2 | Sì | Sì |
| Accessori | ||
| Modulo high‑compute | — | NVIDIA Jetson Orin |
| Batteria smart (quick release) | 9000 mAh | 9000 mAh |
| Caricatore | 54 V • 5 A | 54 V • 5 A |
| Controller manuale | Sì | Sì |
| Altro | ||
| Autonomia | ~2 h | ~2 h |
| OTA intelligente | Sì | Sì |
| Sviluppo secondario [3] | — | Sì |
| Garanzia [4] | 8 mesi | 18 mesi |
[1] La coppia massima varia per giunto; valore riferito al più grande.
[2] Il carico del braccio dipende dalla postura di estensione.
[3] Per dettagli consultare il manuale di sviluppo secondario.
[4] Fare riferimento alle condizioni di garanzia del produttore.
[5] Le specifiche possono variare per scenari e configurazioni.
[6] Mantenere distanza di sicurezza durante l’uso dell’umanoide.
[7] In caso di variazioni estetiche, prevale il prodotto reale.
[8] Alcune funzioni mostrate sono in sviluppo e verranno abilitate.
[9] Il mercato degli umanoidi è agli inizi: valutare limiti prima dell’acquisto.
[10] Prodotto civile: evitare modifiche pericolose o usi rischiosi.
[11] Consultare il sito Unitree e le normative locali per termini e policy.
Prima del pilot umanoide, definisci il compito
G1 crea valore quando il team deve testare task variabili, manipolazione, training procedure o workflow di physical AI senza partire subito da piattaforme full-size. Se il perimetro giusto è didattica, demo o pilot iniziale leggero, il confronto corretto è con Unitree R1; se invece servono benchmark più spinti, guarda la gamma umanoidi Unitree. Per inquadrare KPI, safety e ROI, parti dalla guida su pilot e ROI degli umanoidi e dalla lettura su dati, simulazione e validazione physical AI. Se vuoi capire se G1 sia la leva giusta rispetto a soluzioni più verticali, puoi richiedere una valutazione tecnica.
Unitree G1
Definisci il task prima del pilot umanoide compatto
G1 crea valore quando il team sa cosa vuole testare: teleoperazione, manipolazione, training procedure o benchmark di physical AI. Partiamo da ambiente, safety, dati e criteri di successo.
Task verificabile
Obiettivo, scenario, durata prova e limiti vengono definiti prima della demo.
Ambiente controllato
Spazi, supervisione, procedure e persone presenti entrano nel piano.
Dati e sviluppo
SDK, log, video e pipeline AI restano collegati al lavoro del team.