Scarico e Carico
Pallettizzazione, depallettizzazione e carico/scarico con tempi ciclo sotto controllo
Il cobot diventa la leva giusta quando ci sono colli ripetitivi, cambio formato frequente, fine linea instabile o saturazione manuale. Il pacchetto DOBOT aiuta a valutare layout, pattern pallet, accessori e KPI di throughput senza confondere il servizio con una demo generica.
Perché scegliere la pallettizzazione con DOBOT
Attiva rapidamente celle di pallettizzazione e depallettizzazione senza codice, con strumenti software dedicati e integrazione completa.
Modelli per questa applicazione
Seleziona fino a 4 modelli e confrontali fianco a fianco.
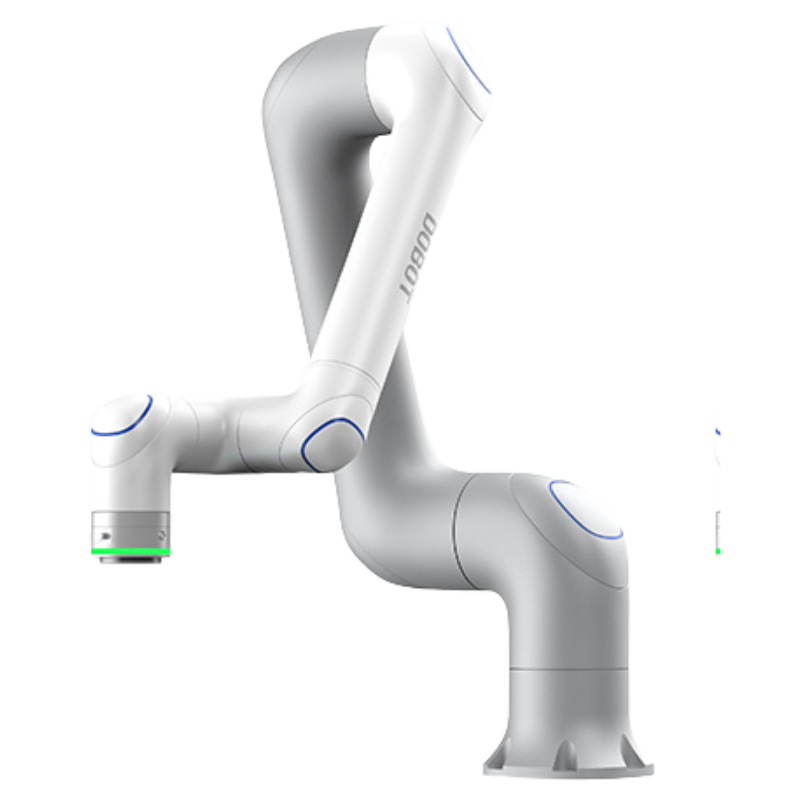
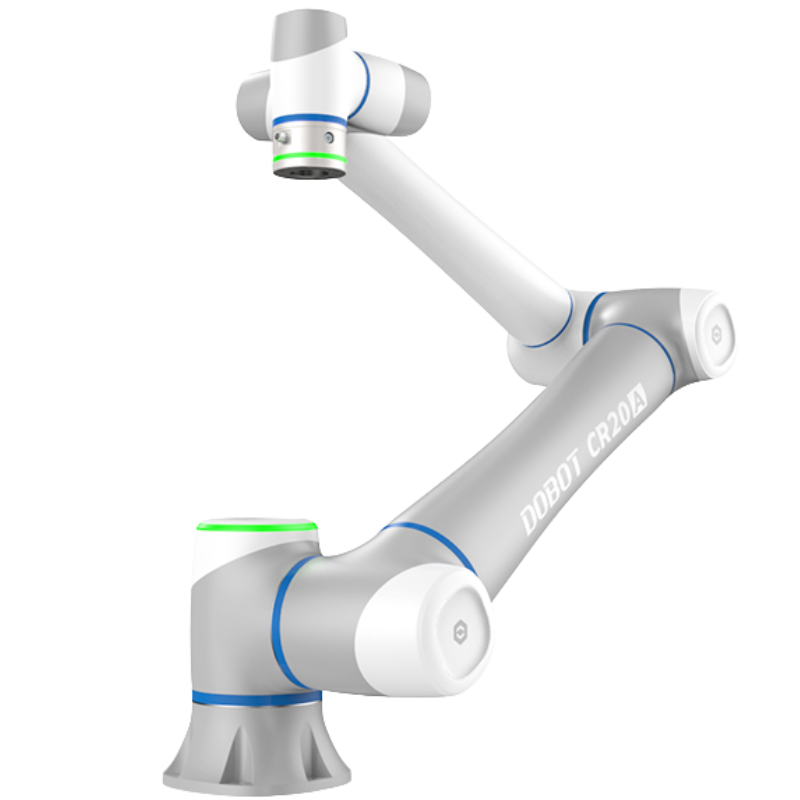
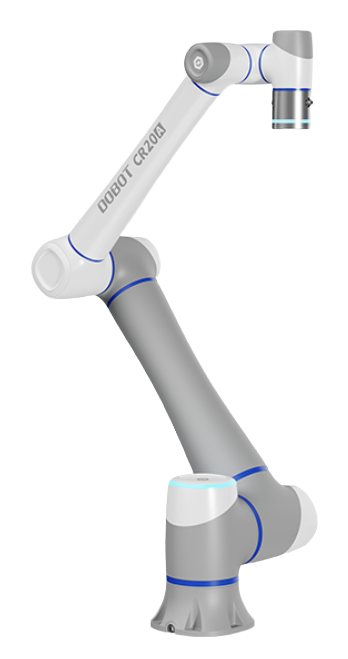
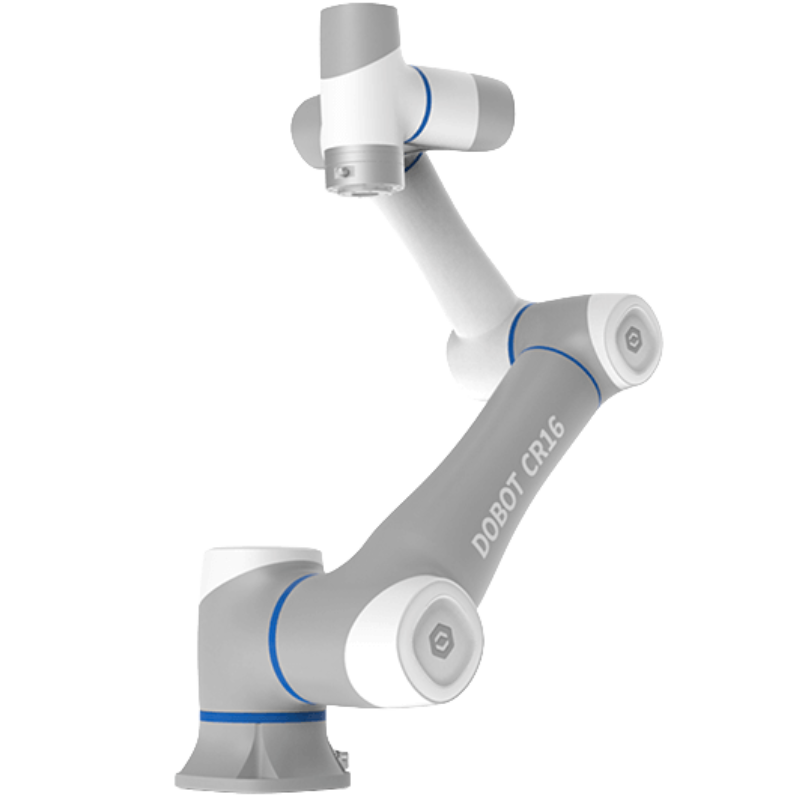
Confronto Modelli — Scarico e Carico
| Caratteristiche | |
|---|---|
| Nessun dato tecnico disponibile per questi modelli in questa categoria. Contattaci per una scheda tecnica completa. |
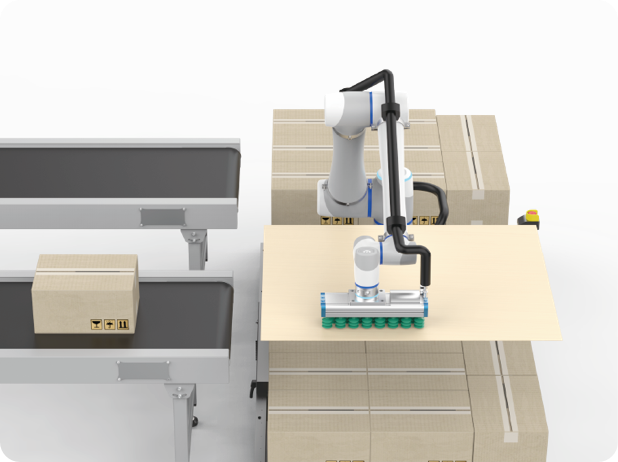
Workstation di Pallettizzazione All-in-One
Soluzione integrata per velocizzare l'avvio: tutto ciò che serve, dal robot alla sicurezza.
- Base, colonna lifting o fissa
- Cobot DOBOT + controller/IO/PLC
- Pannello HMI e software no-code
- Nastri, rulliere, sensori e scanner
- Visione 2D/3D per identificazione
- Interlayer e Top Cap devices
- Recinzioni e scanner di sicurezza

Configurazioni disponibili
Scegli la soluzione più adatta al carico utile e all'altezza pallet
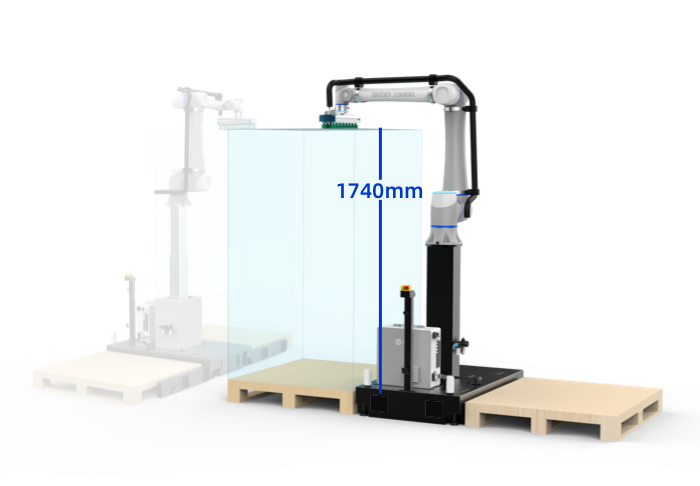
Lifting Palletizing Workstation
Ampia altezza di impilamento e flessibilità per formati variabili.

Fixed Palletizing Workstation
Struttura compatta, rapida da installare, ottimale per altezze standard.
Flusso di lavoro in 6 step
Dal riconoscimento del collo alla pila completa
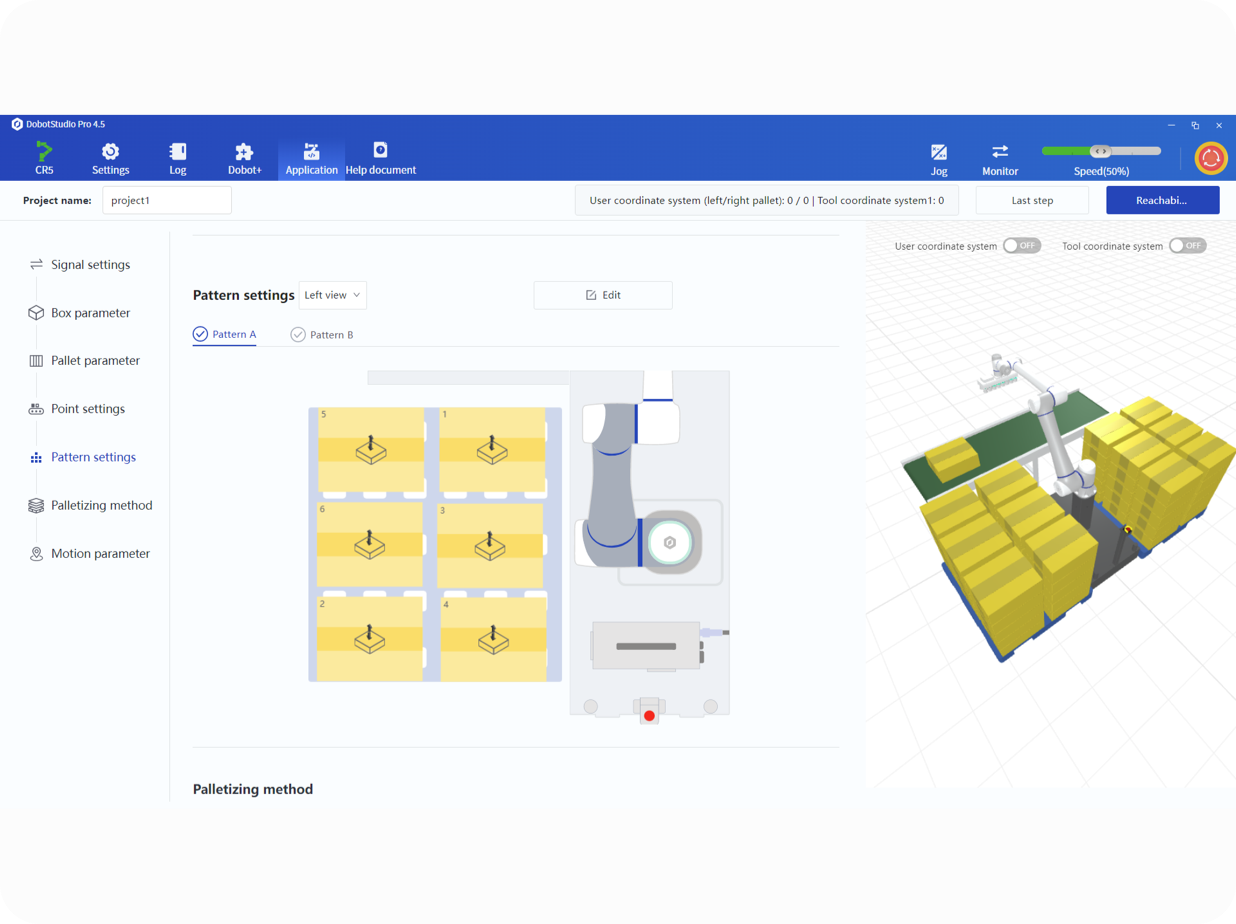
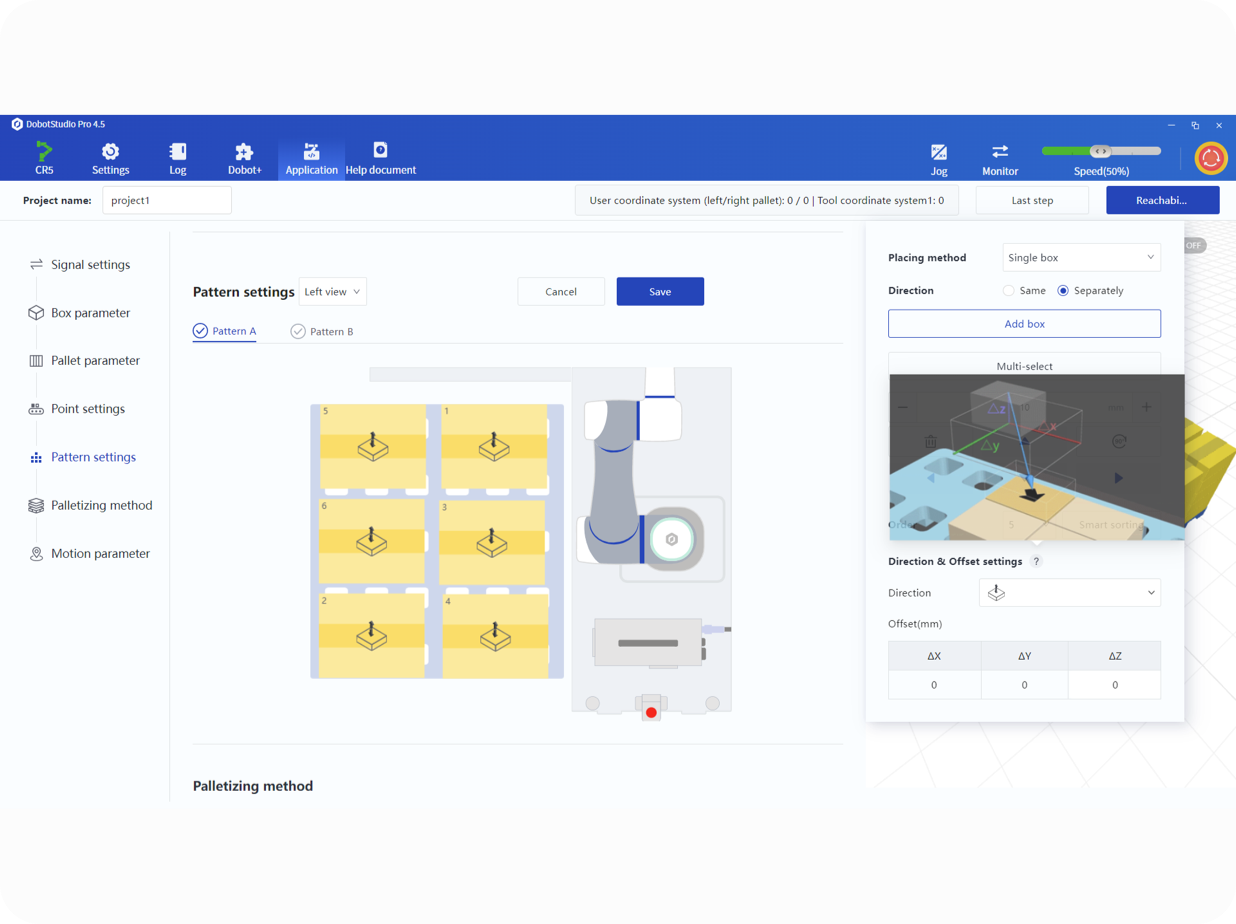
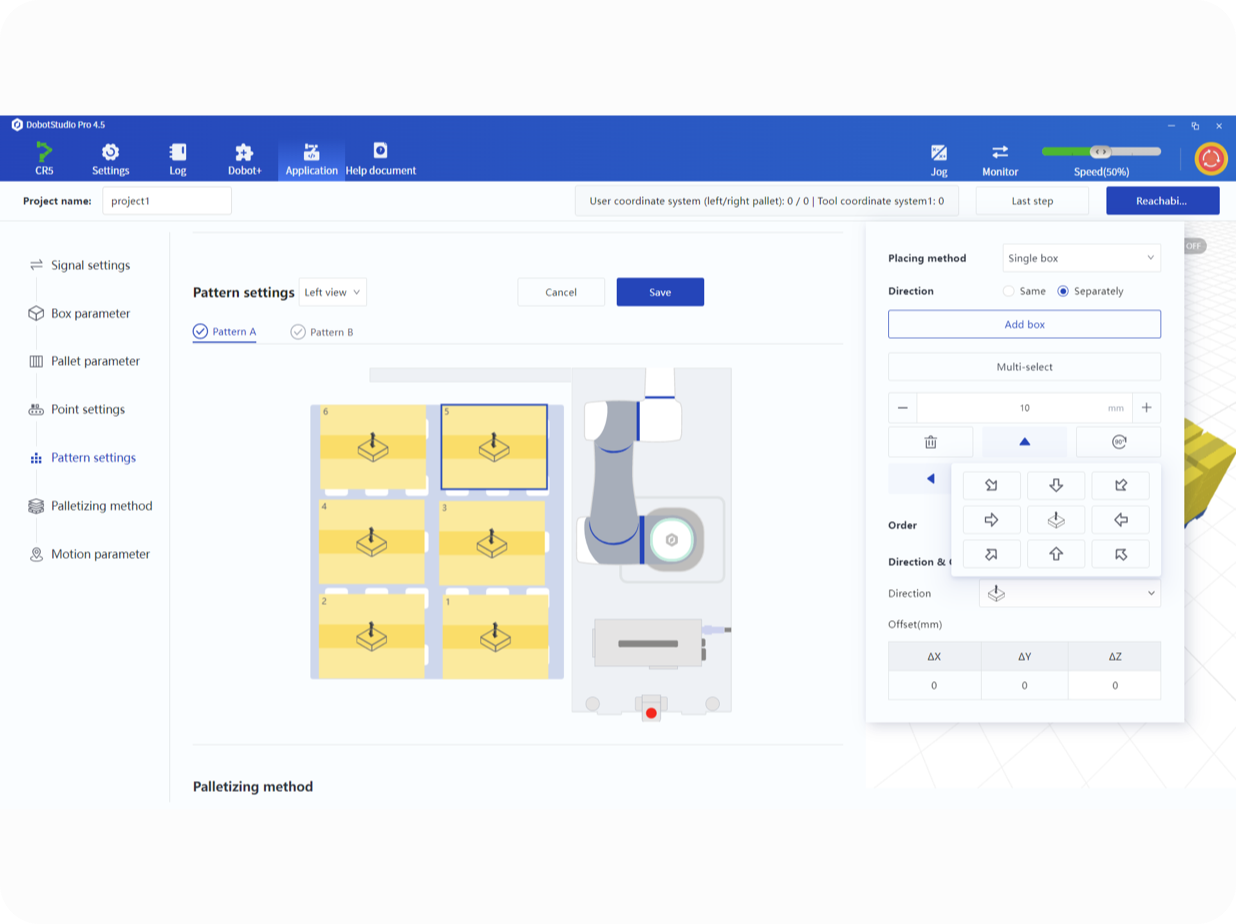
Software no-code: strumenti inclusi
Tutto ciò che serve per progettare, simulare e avviare
Definisci dimensioni colli, schema di impilamento e altezza.
Template predefiniti e generatore automatico di layout.
Controllo collisioni, tempi ciclo e parametri di velocità.
Traiettorie fluide e soste ridotte per massimo throughput.
Inserimento automatico di fogli interlayer e coperture.
Integrazione con linee esistenti, rulliere e sensori.
Esempi di layout di pallettizzazione
Scorri per esplorare i pattern

Domande Frequenti
Con il pacchetto processo DOBOT, la messa in servizio di una cella standard richiede circa 30 minuti. Attività aggiuntive dipendono da integrazioni con linea e sicurezza.
No: tool no-code con editor pallet, libreria pattern e simulatore. Possibile estendere con script e PLC per logiche avanzate.
Sì. Il software supporta formati differenti e ottimizza automaticamente il pattern.
La versione Lifting offre maggiore altezza utile; la Fixed è più compatta. Ti aiutiamo a dimensionare la soluzione su payload, reach e layout.
Scarico e carico
Dimensiona fine linea, pallet e presa prima dell'automazione
Palletizzazione, depallettizzazione e carico/scarico funzionano quando colli, altezze, pattern, reach e cambio formato sono chiari. Analizziamo layout e volumi prima di proporre braccio, accessori e piano di integrazione.
Layout pallet
Ingombri, altezze, buffer, percorsi e accessi manutenzione vengono verificati.
Grip e gestione colli
Presa, pattern, mixed-case, sensori e interfacce linea restano collegati.
Throughput e ROI
Stimiamo tempo ciclo, carichi manuali evitati, saturazione e payback.