Il robot che piega magliette è il tipo di video che rischiamo di liquidare troppo in fretta: carino, virale, un po’ domestico. In realtà racconta una delle domande più dure della physical AI: come fa un robot a imparare il mondo fisico senza essere addestrato per anni su ogni singolo robot, stanza, pinza e oggetto?
The Robot Report ha inserito Generalist GEN-1 tra le storie robotiche più lette di aprile. La società dichiara risultati forti: 99% di successo medio su una serie di task dove GEN-0 arrivava al 64%, completamento circa tre volte più veloce e una strategia di pretraining basata su dati real-world raccolti anche da dispositivi indossabili su persone, non su enormi dataset di teleoperazione robotica.
In sintesi: la parte interessante non è “un robot piega una T-shirt”. È che la physical AI sta cercando scorciatoie migliori per imparare gesti fisici, contatto, recupero e variabilità. Questo riguarda anche assemblaggio, scarico-carico e applicazioni con bracci come Dobot CRA.
Perché conta: in fabbrica il valore non è fare una presa perfetta una volta. È recuperare quando il pezzo è storto, quando la scatola si muove, quando il tessuto si piega male o quando l’operatore cambia il modo in cui presenta il componente.
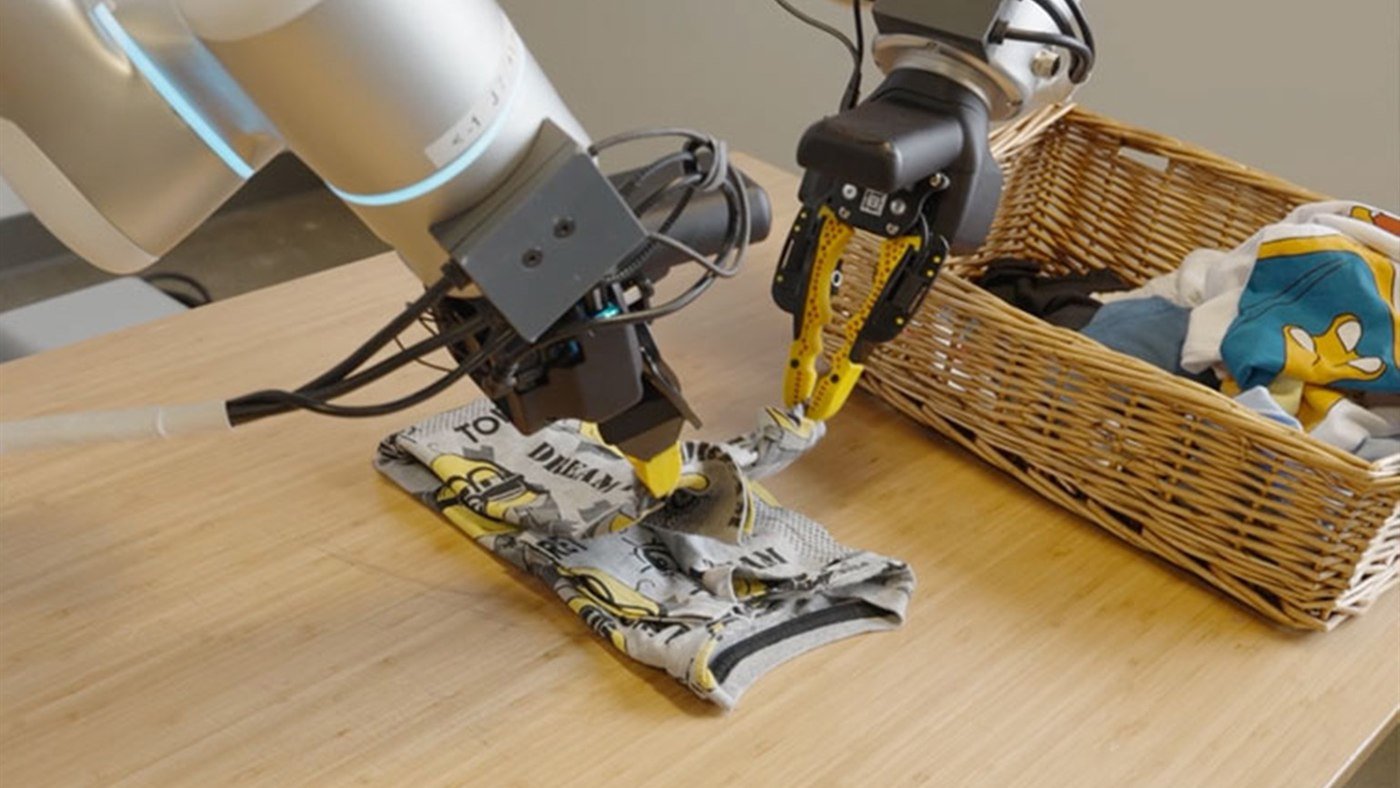
La maglietta è un oggetto cattivo
Una maglietta non ha una posa unica. Si piega, scivola, crea ombre, nasconde bordi, cambia forma dopo ogni contatto. Per un umano è un gesto quasi automatico; per un robot è un piccolo labirinto di visione, forza e decisioni.
Per questo il video è meno banale di quanto sembri. Se un robot riesce a piegare una maglietta 86 volte di fila, come dichiara Generalist per GEN-1, non sta solo “seguendo una traiettoria”. Sta affrontando variazioni che non possono essere risolte con un percorso fisso da punto A a punto B.
Lo stesso principio vale in produzione. Pensiamo a cavi, guarnizioni, packaging flessibile, film plastici, tessuti tecnici, sacchetti, componenti con tolleranze non perfette. Sono tutti oggetti che non si lasciano descrivere bene con una geometria rigida.
I dati umani entrano prima dei dati robotici
Il punto più interessante di GEN-1 è la direzione dei dati. Generalist sostiene che il modello base venga preaddestrato senza dati robotici, usando invece attività umane raccolte con dispositivi a basso costo. Poi il sistema si adatta al robot e al task specifico.
Questa idea è potente perché sposta il problema. La teleoperazione robotica resta utile, ma è costosa: serve un robot, serve qualcuno che lo guidi, serve tempo, e ogni embodiment cambia le regole. I dati umani, invece, possono raccontare una quantità enorme di dinamiche fisiche: come una mano afferra, come un oggetto si muove, come un materiale si deforma, come si corregge un errore.
Non significa che il robot “capisca come noi”. Significa che il modello può arrivare al task con una memoria statistica più ricca del mondo fisico. Poi deve ancora tradurla nel corpo del robot: pinza, braccio, sensori, velocità, limiti safety e ambiente reale.
Il vero test è il recupero
Generalist cita anche comportamenti di recovery: se una rondella si sposta, il robot può appoggiarla di nuovo, riprenderla o usare una presa diversa. Questo è il punto in cui la physical AI diventa industrialmente interessante.
In fabbrica non si paga il robot per il caso perfetto. Il caso perfetto lo risolve anche una buona automazione tradizionale. Il valore arriva quando il sistema sa gestire la coda lunga: un pezzo ruotato, un bordo coperto, una presa incerta, un oggetto che si incastra, una scatola che non è dove doveva essere.
Per una PMI, questa distinzione evita due errori. Il primo è innamorarsi della demo e dimenticare la variabilità reale. Il secondo è rifiutare la physical AI perché “non è ancora perfetta”. La domanda corretta è più concreta: su quale task la recovery automatica riduce davvero fermi, scarti o interventi manuali?
Dove potrebbe arrivare prima
Non tutto è pronto per la produzione. La stessa Generalist riconosce che alcuni task richiedono livelli di successo superiori al 99% per essere utili in contesti reali. Ma ci sono aree dove la traiettoria è chiara:
- kitting di componenti con variazioni controllate;
- imballaggio e preparazione scatole;
- manipolazione di oggetti morbidi ma non critici;
- asservimento con pezzi orientati in modo variabile;
- controllo qualità dove il robot può riprovare senza danneggiare il prodotto;
- training di operatori e validazione di processi prima del rollout.
Il collegamento con Bubbles è pratico: prima di promettere “AI che fa tutto”, conviene scegliere un task stretto, misurare variabilità e capire quale combinazione di robot, pinza, visione e dati serve. Un Dobot CR5 collaborativo o un Dobot CR10 possono essere il corpo; la physical AI deve essere validata sul gesto che crea valore.
Conclusione
Il robot che piega magliette non è una curiosità da social. È una finestra su come i robot potrebbero imparare a gestire oggetti meno educati delle scatole: materiali morbidi, prese incerte, errori piccoli ma frequenti.
La lezione per l’industria è semplice: la prossima automazione non sarà solo più veloce. Dovrà essere più capace di recuperare, come mostrano anche i casi di materiali deformabili nella manifattura. Se nel tuo processo il problema non è il ciclo standard ma tutte le eccezioni intorno, parliamone partendo da campioni reali. Lì si capisce se serve una cella tradizionale, un cobot ben integrato o una componente di physical AI.
Articoli correlati
Vedi tutti →
La scuola degli umanoidi: prima di lavorare devono imparare da noi

Robotica Italia 2028: la checklist per le PMI che vogliono investire bene

Componenti robotica 2026: la physical AI si vince nei dettagli
Serve supporto per applicare queste idee?
Il team Bubbles Technology progetta soluzioni robotiche su misura per PMI in Campania e in tutta Italia. Prenota una consulenza gratuita per discutere esigenze, ROI e roadmap.