
I robot industriali non falliscono solo perché "vedono male". Falliscono quando il dato arriva tardi, quando due sensori non sono sincronizzati, quando un cavo si muove in una macchina compatta o quando la rete interna non regge il traffico di più telecamere, lidar e IMU nello stesso ciclo.
The Robot Report ha pubblicato un approfondimento sponsorizzato da Analog Devices sul ruolo di GMSL, Gigabit Multimedia Serial Link, nelle architetture di visione robotica. Il punto utile per una PMI manifatturiera è molto concreto: man mano che i robot diventano mobili, veloci e pieni di sensori, la percezione non è più una feature. Diventa una parte dell'impianto.
Perché il problema non è solo la camera
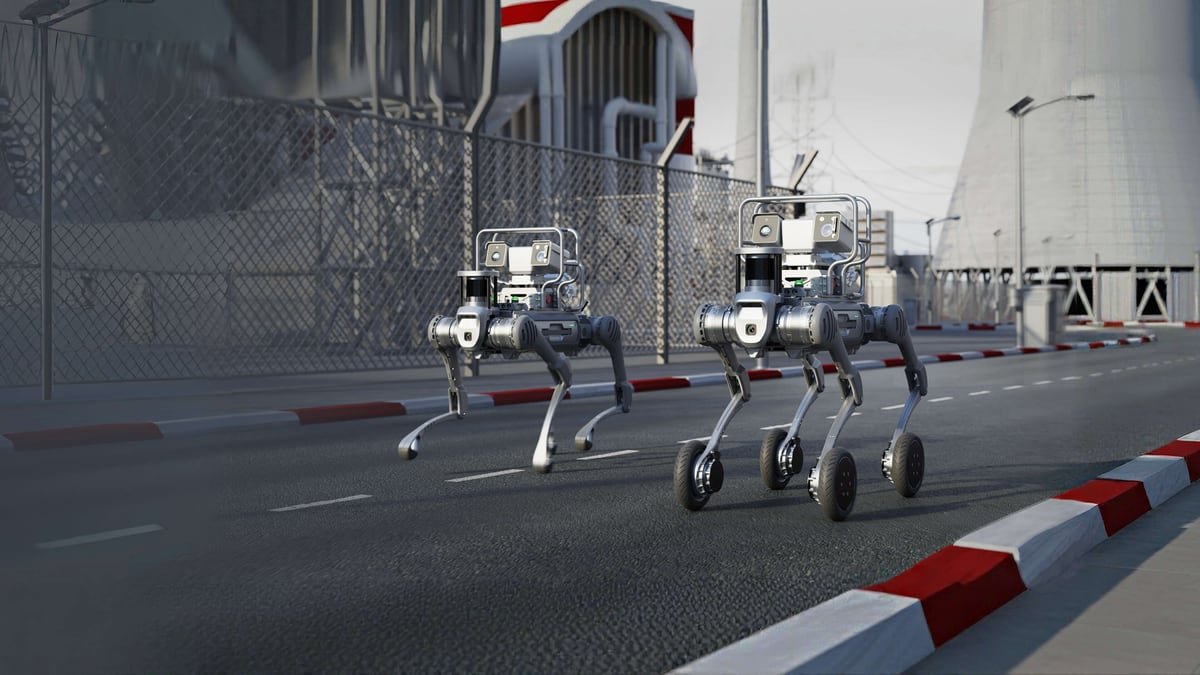
Per anni molte celle robotiche hanno trattato la visione come un accessorio: una camera sopra il nastro, una luce, un trigger, un controllo qualità o una presa guidata. Nei robot mobili e nei quadrupedi industriali, invece, la visione è distribuita. Il robot deve capire profondità, ostacoli, persone, superfici, marker, scaffali, porte e zone vietate mentre si muove.
Nel pezzo di The Robot Report, Stephen Liu di Advantech sintetizza bene il cambio di scala: la difficoltà non è più solo l'immagine, ma l'orchestrazione di bandwidth, latenza, sincronizzazione e compute. Anche pochi millisecondi di deriva fra sensori possono degradare navigazione e sensor fusion.
Qui GMSL interessa perché nasce per portare video ad alta risoluzione, segnali di controllo e sincronizzazione su un cavo leggero, con bassa latenza e buona resistenza alle interferenze elettromagnetiche. È una tecnologia maturata nell'automotive e oggi sempre più pertinente per robot che devono muoversi in ambienti industriali veri.
Cosa cambia nel progetto di una flotta
Una flotta AMR o un robot da ispezione non va valutato solo con la domanda "quanti megapixel ha la camera?". La domanda corretta è: quanta informazione sensoriale serve per prendere decisioni affidabili nel tempo ciclo richiesto?
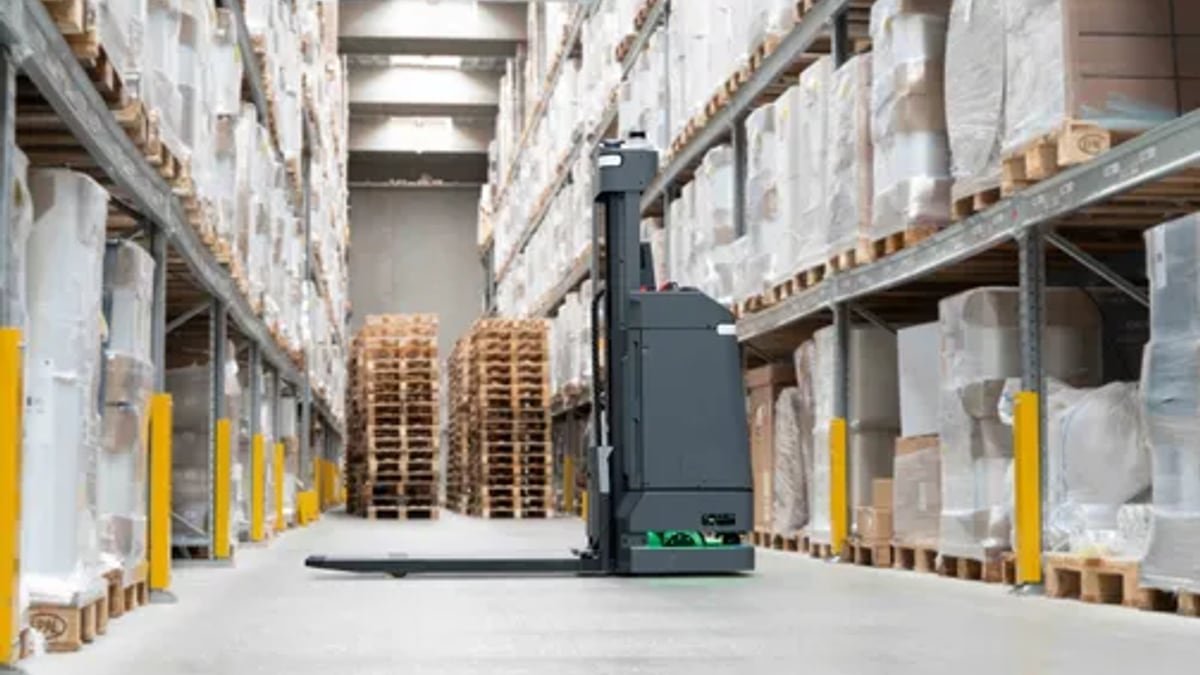
In un ambiente logistico il robot deve distinguere pallet, persone, corsie strette, scaffali, mezzi manuali e zone temporaneamente ostruite. In un impianto energia o in un reparto sporco deve continuare a lavorare con vibrazioni, polvere, umidità, cavi lunghi e possibili disturbi elettrici. In entrambi i casi, il problema non è estetico. Se la percezione si degrada, il robot rallenta, si ferma o richiede intervento umano.
Per questo la checklist tecnica dovrebbe includere almeno cinque punti: throughput video reale, sincronizzazione hardware, latenza end-to-end, robustezza connettori/cavi, diagnostica del degrado. Il robot deve sapere non solo cosa vede, ma anche quando la propria visione non è più affidabile.
Nelle applicazioni Bubbles, questo ragionamento tocca direttamente ispezione e sorveglianza, robot quadrupedi come Unitree B2 e piattaforme mobili per movimentazione come Pudu T300. Cambia il corpo del robot, ma resta la stessa domanda: il dato sensoriale arriva abbastanza bene da sostenere il compito?
KPI da misurare prima del rollout
Il rischio, nelle PMI, è comprare un robot ricco di sensori e poi scoprire che la fabbrica reale è più dura della demo. Una prova seria dovrebbe misurare il tasso di stop per percezione incerta, il tempo medio di recovery, la percentuale di tratte percorse senza intervento, la velocità media in presenza di persone e la stabilità delle letture in zone con riflessi, polvere o vibrazione.
La visione robotica va quindi validata come parte del processo. Se un robot deve ispezionare una linea, non basta una demo su pavimento pulito. Serve una giornata di test con passaggi stretti, operatori, luce variabile, superfici sporche e procedure di fallback. Se un AMR deve servire un magazzino, il test deve includere traffico reale, pallet fuori posizione e ostacoli temporanei.
La scelta pratica per le PMI
Per un plant manager, GMSL non è una sigla da mettere nel capitolato a prescindere. È un segnale di maturità architetturale quando l'applicazione richiede più sensori sincronizzati, distanza fra sensore e compute, ambienti difficili o robot compatti con cablaggi delicati.
La scelta giusta non è "GMSL sì o no". È capire se il progetto ha un rischio sensoriale alto. Se il robot opera in una cella fissa con una singola camera e task stabile, una soluzione più semplice può bastare. Se invece il robot si muove, usa più camere e deve reagire in tempo reale, il trasporto del dato diventa parte della safety operativa.
Questo è il punto spesso trascurato nei preventivi. Il costo non è solo la camera migliore. È il sistema che impedisce a una buona camera di diventare inutile quando il robot entra in produzione.
Conclusione
La robotica industriale del 2026 parla molto di AI, ma il robot vede il mondo attraverso hardware, cavi, timestamp e diagnostica. Se questi strati non reggono, il modello più intelligente riceve un input fragile.
Per chi sta valutando AMR, quadrupedi o sistemi di ispezione, la lezione è semplice: prima di chiedere quanto è smart il robot, chiediamo quanto è affidabile la sua percezione quando la fabbrica smette di assomigliare a uno showroom. È lì che una scelta architetturale come GMSL smette di essere un dettaglio tecnico e diventa continuità operativa.
Fonti
- The Robot Report, GMSL and the growing ecosystem around robotic vision systems
- Analog Devices, Gigabit Multimedia Serial Link technology
- Bubbles Technology, Ispezione e sorveglianza
Articoli correlati
Vedi tutti →
Robot open source: perché LeRobot può accelerare la robotica fisica
Mani robotiche 2026: la destrezza diventa il vero collo di bottiglia
Programmazione robot offline 2026: meno fermo linea, più celle replicabili
Serve supporto per applicare queste idee?
Il team Bubbles Technology progetta soluzioni robotiche su misura per PMI in Campania e in tutta Italia. Prenota una consulenza gratuita per discutere esigenze, ROI e roadmap.