
Brain Corp ha annunciato una collaborazione estesa con UC San Diego per sviluppare semantic mapping e contextual intelligence nei robot autonomi. La notizia, riportata da The Robot Report, parte da numeri concreti: oltre 50.000 AMR distribuiti globalmente e più di 25 milioni di ore operative in ambienti commerciali reali.
Per chi gestisce magazzini, retail, ospedali o stabilimenti, il messaggio è semplice: il robot mobile non può limitarsi a evitare ostacoli. Deve capire che tipo di spazio attraversa, quali aree cambiano spesso, dove le persone si muovono in modo imprevedibile e quali eccezioni bloccano davvero il turno.
In sintesi
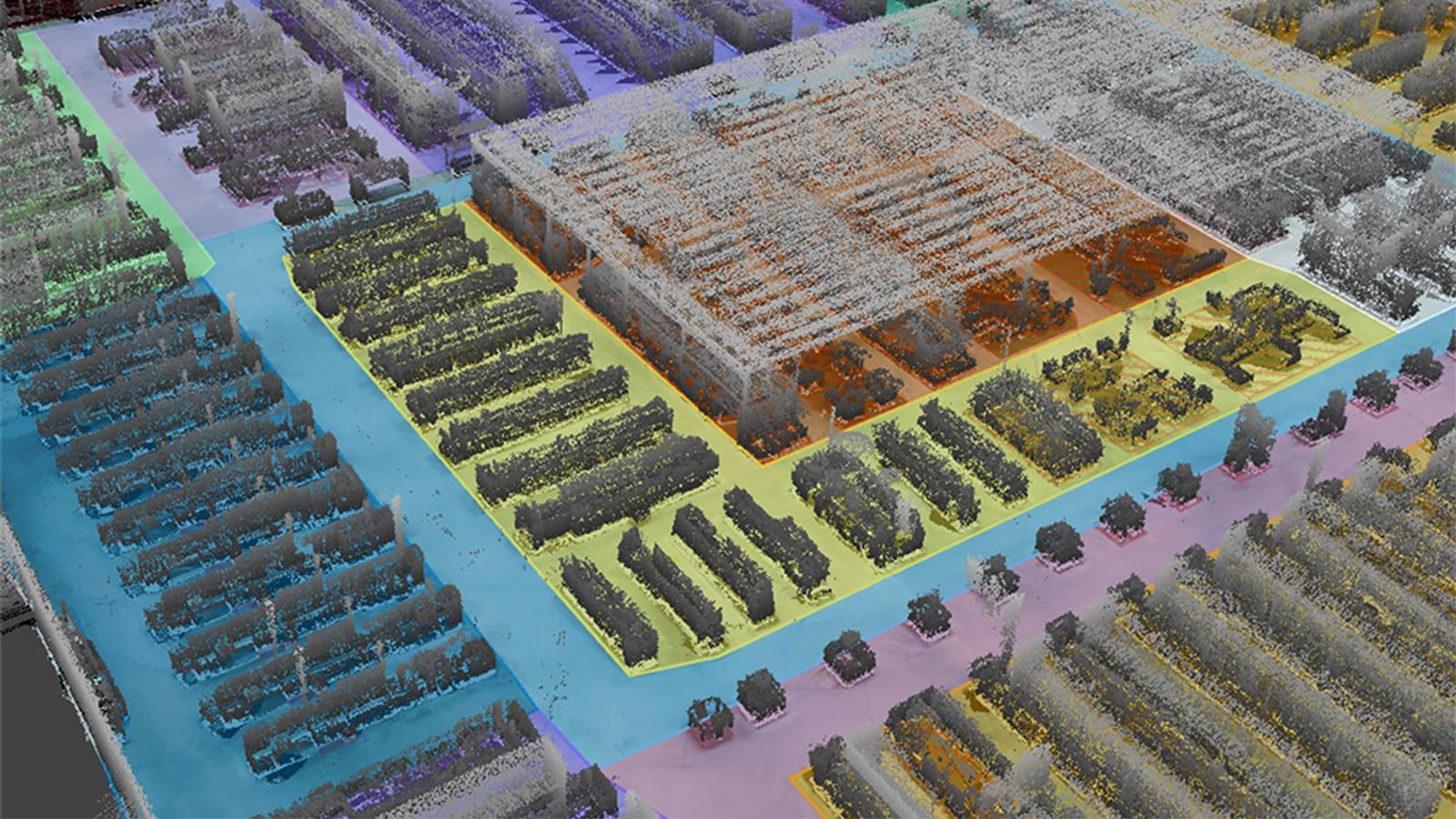
La mappa semantica è il passaggio dalla geometria al significato. Una planimetria dice al robot dove sono pareti e corridoi; una rappresentazione contestuale gli dice che una corsia è temporaneamente ostruita, che una zona è ad alta densità umana, che un pallet fuori posto cambia la priorità della missione, che una porta non è solo un varco ma un punto di rischio operativo.
Questo è il motivo per cui Brain Corp e UC San Diego parlano di contextual grounding layer. Le VLA e i modelli generativi possono aiutare, ma in fabbrica o in un sito commerciale non basta riconoscere oggetti da una camera. Serve una base spaziale affidabile su cui far ragionare flotta, sensori fissi e agenti software.
Perché SLAM non basta più
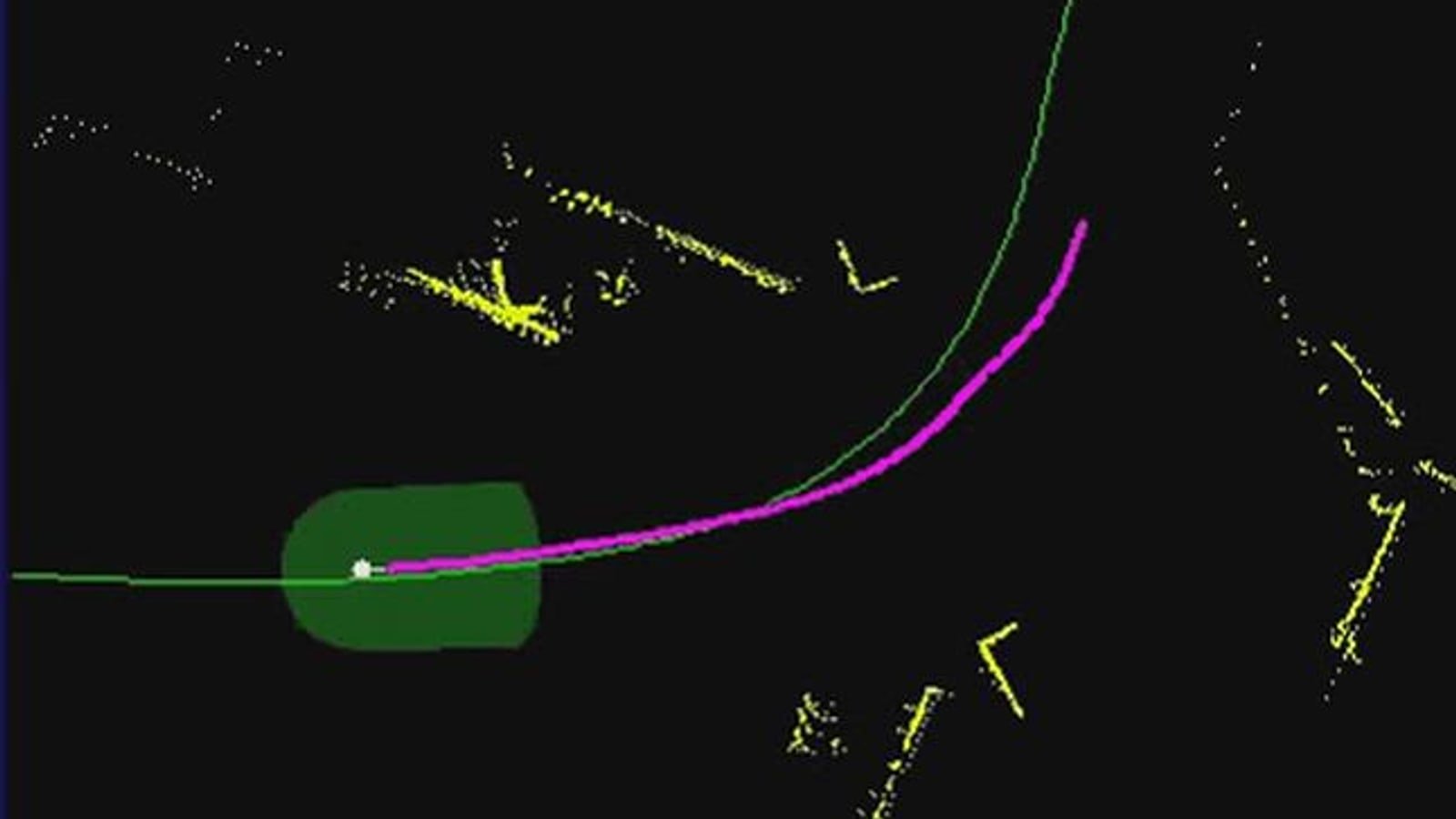
Lo SLAM ha permesso ai robot mobili di uscire dalle celle fisse. Ha dato loro una posizione, una mappa, una traiettoria. Ma una flotta industriale lavora in ambienti che cambiano: pallet lasciati in corsia, operatori stagionali, scaffali riconfigurati, carrelli manuali, porte temporaneamente chiuse, zone interdette per manutenzione.
Il salto semantico serve a trasformare questi eventi in informazioni operative. Non è un dettaglio accademico. È la differenza tra un AMR che si ferma davanti a ogni anomalia e una flotta che sa distinguere tra ostacolo temporaneo, cambiamento strutturale e rischio da scalare a un supervisore.
I KPI giusti per una flotta che capisce
Quando si valuta una flotta AMR, il rischio è fermarsi ai KPI facili: velocità massima, autonomia batteria, payload, numero di missioni. Sono utili, ma non raccontano la qualità dell'autonomia in campo.
I KPI da aggiungere sono più operativi:
- tasso di missioni completate senza intervento umano;
- tempo medio di recovery dopo ostacolo;
- numero di blocchi per area e fascia oraria;
- variazioni di layout riconosciute e propagate alla flotta;
- incidenti near-miss o rallentamenti in zone ad alta densità;
- precisione con cui la mappa distingue ostacolo temporaneo e cambiamento stabile.
Qui un servizio di movimentazioni interne non dovrebbe vendere solo robot, ma progetto di flotta. Significa partire dal flusso reale, mappare eccezioni, integrare WMS o sistemi di chiamata e decidere quali dati devono tornare al responsabile operativo.
Dove entra la physical AI
Brain Corp descrive il contextual grounding come infrastruttura per robot, droni, veicoli autonomi, sensori fissi e agenti AI. È una definizione ambiziosa, ma corretta: la physical AI industriale non è un modello che vive da solo nel robot. È una catena composta da percezione, mappa, memoria operativa, policy di sicurezza e supervisione.
Per una PMI questo cambia la domanda di acquisto. Non basta chiedere: “quanti robot servono?”. Bisogna chiedere: quale parte del sito deve essere compresa dalla flotta, con quale frequenza la mappa viene aggiornata, chi approva le modifiche, quali eventi restano nel log e quali producono un'azione.
Un Pudu T300 o un Pudu T600 diventano molto più interessanti quando entrano in un sistema che misura missioni, congestione, eccezioni e affidabilità, non quando vengono trattati come carrelli autonomi isolati.

Checklist per decidere se è il momento giusto
Prima di introdurre una flotta AMR con ambizione semantica, conviene fare un controllo freddo:
- il layout cambia spesso o è relativamente stabile?
- gli ostacoli sono eccezioni rare o parte normale del turno?
- esiste un proprietario dei dati di flotta?
- i percorsi possono essere misurati con eventi e non solo con impressioni?
- il personale sa distinguere blocco macchina, blocco processo e blocco safety?
- l'integrazione con WMS, ERP o chiamate operatore è davvero necessaria fin dal primo giorno?
Se la risposta è no a quasi tutto, meglio partire con automazione più semplice e misurare. Se la risposta è sì, la mappa semantica non è un lusso: è il modo per evitare che la complessità venga scaricata sugli operatori.
Conclusione
La collaborazione Brain Corp-UC San Diego è interessante perché sposta l'attenzione dal robot singolo alla memoria dello spazio. Nel 2026 la flotta mobile che vince non sarà quella che “vede” di più, ma quella che conserva contesto utile e lo trasforma in decisioni ripetibili. Per chi sta valutando AMR in magazzino o in produzione, il punto di partenza resta pragmatico: meno promesse sull'AI, più evidenza su missioni, recovery, congestione e qualità della mappa.
Articoli correlati
Vedi tutti →
Eno sceglie le ruote: il robot utile non deve sembrare umano

Robot commerciali 2026: il collo di bottiglia è il compute

Skild compra Zebra Robotics: cosa cambia nei magazzini
Serve supporto per applicare queste idee?
Il team Bubbles Technology progetta soluzioni robotiche su misura per PMI in Campania e in tutta Italia. Prenota una consulenza gratuita per discutere esigenze, ROI e roadmap.