
La robotica logistica è entrata in una fase meno spettacolare e molto più importante. Dopo anni di demo con un robot mobile che porta una scatola da A a B, il vero test nel 2026 è un altro: cosa succede quando il robot lavora per otto ore, incrocia operatori, muletti, urgenze, scaffali pieni, porte chiuse, priorità che cambiano e un WMS che non aspetta.
Il contesto è chiaro. L'IFR classifica gli AMR come robot di servizio professionali e indica logistica e trasporto tra i campi più prosperi della service robotics. Il Robotics Summit & Expo 2026, in programma a Boston il 27 e 28 maggio, mette logistica e manufacturing tra i mercati centrali, accanto a demo e discussioni su motion control, sensing, AI, software, manufacturability e scale. Per chi produce, la sintesi è semplice: il robot mobile non è più un esperimento separato dal processo. Diventa infrastruttura operativa.
In sintesi
Un AMR utile non è quello che naviga bene nel corridoio vuoto. È quello che riduce camminate, attese e movimentazioni inutili senza creare nuove eccezioni per gli operatori. Prima di scegliere una piattaforma conviene misurare missioni, distanze, colli di bottiglia, aree miste, integrazione WMS/MES e responsabilità durante il turno.
Dal pilot al flusso: dove si rompe il progetto
Molti progetti di robotica logistica falliscono in un punto preciso: il pilot misura il robot, non il flusso. Si prova una missione, si verifica che il mezzo eviti ostacoli, si mostra una consegna riuscita. Poi arriva la realtà: il picking non è pronto, l'operatore carica in ritardo, il robot aspetta davanti a una porta, il turno di notte ha regole diverse, il responsabile IT chiede come si autentica il sistema, il plant manager vuole sapere chi interviene se una missione resta bloccata.
Per questo la domanda corretta non è “quanti AMR ci servono?”, ma “quali missioni ripetitive oggi consumano tempo umano senza aggiungere valore?”. Se la risposta è chiara, la robotica diventa un progetto di movimentazioni interne, non un acquisto isolato.
I KPI che contano prima del preventivo
Nel 2026 un progetto AMR serio dovrebbe partire da un rilievo molto concreto. Quante missioni al giorno? Quanto cammina l'operatore per prelevare o consegnare materiali? Quanti minuti perde la linea aspettando componenti? Quante urgenze interrompono il piano? Quante aree sono miste con persone, muletti o transpallet?
I KPI minimi sono pochi, ma vanno misurati bene:
- metri uomo risparmiati per turno;
- missioni completate senza intervento;
- tempo medio di attesa al punto di pickup e drop-off;
- percentuale di missioni riassegnate o fallite;
- impatto su fermo linea, picking, carico e scarico;
- tempo di recovery quando un robot è bloccato;
- utilizzo reale della flotta, non solo disponibilità del singolo mezzo.
Senza questi numeri, il ROI resta una promessa. Con questi numeri, si può confrontare un AMR leggero, una soluzione con rulliera, un robot tipo Pudu T300 o una configurazione più pesante come Pudu T600 su missioni, payload, layout e frequenza.
Sicurezza e traffico non sono note a piè pagina
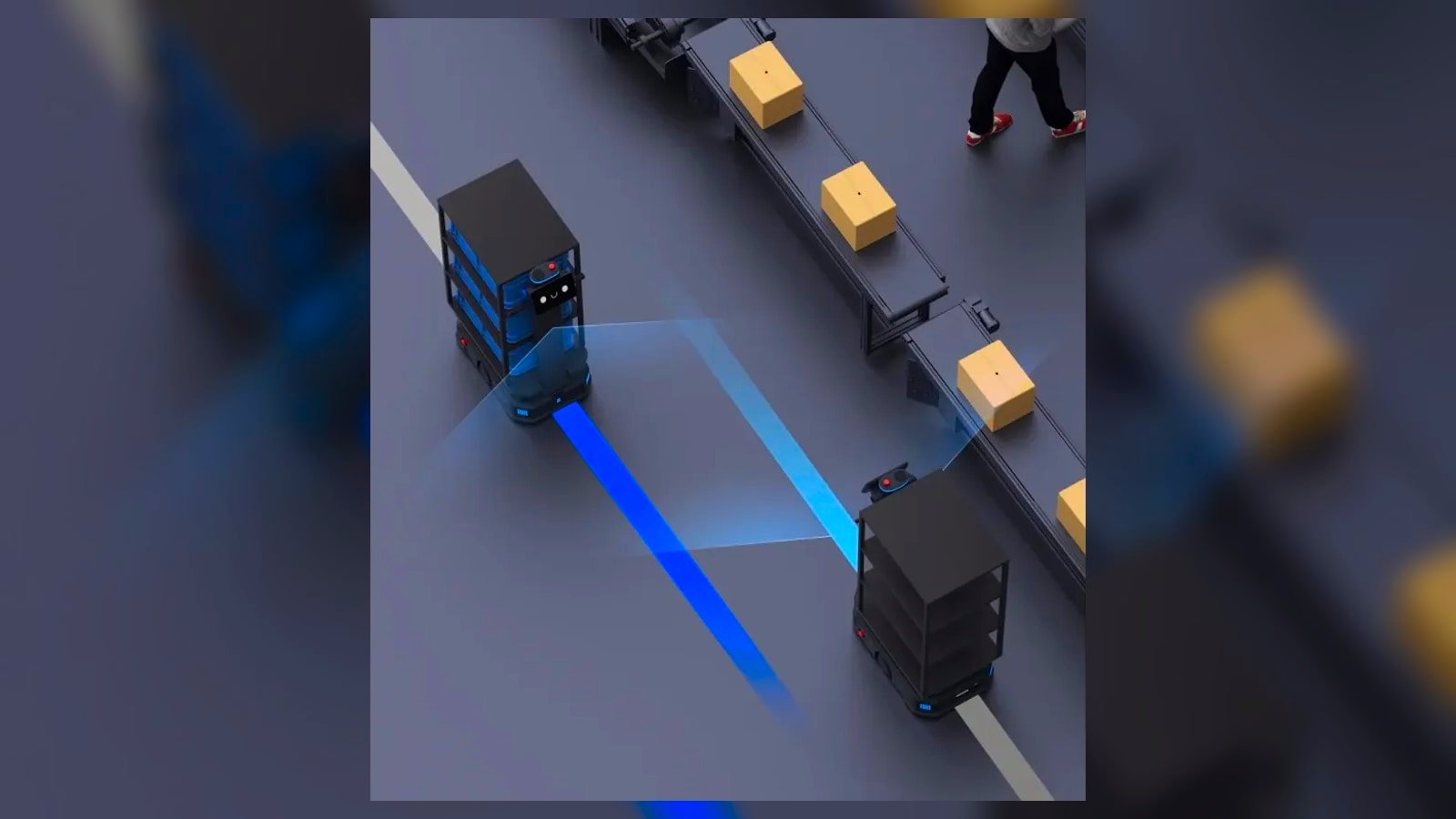
Il magazzino non è un laboratorio. Un robot mobile deve convivere con operatori che cambiano percorso, carrelli lasciati fuori posto, pallet sporgenti, pavimenti non perfetti, segnaletica parziale. La sicurezza non può essere trattata come un accessorio del mezzo: deve essere parte del disegno del flusso.
Questo significa definire corsie, priorità, velocità, zone lente, punti di attesa, procedure di sblocco, formazione degli operatori e responsabilità. Significa anche chiarire che cosa vede il sistema: lidar, camere, marker, mappe, sensori di bordo, interfaccia con porte o ascensori. Un AMR che “si ferma sempre” è sicuro ma inutile. Un AMR che passa ovunque è pericoloso. Il progetto vero sta nel mezzo: ridurre attriti senza rendere opaco il comportamento.

L'integrazione decide se scala
Un AMR che vive solo nella sua app può funzionare in una demo. In produzione deve parlare con il resto dell'azienda: WMS, MES, ERP, PLC, porte automatiche, chiamate operatore, badge, log di manutenzione. Non serve integrare tutto subito, ma serve sapere quali dati sono obbligatori e quali possono restare manuali nella prima fase.
La progressione più sana è questa: prima mappare missioni e layout, poi simulare frequenza e congestione, poi fare un pilot limitato con KPI di turno, infine integrare gli eventi che davvero riducono lavoro manuale. Se si parte dall'integrazione totale, il progetto si appesantisce. Se si parte dal robot isolato, non scala.
Dove partire in una PMI
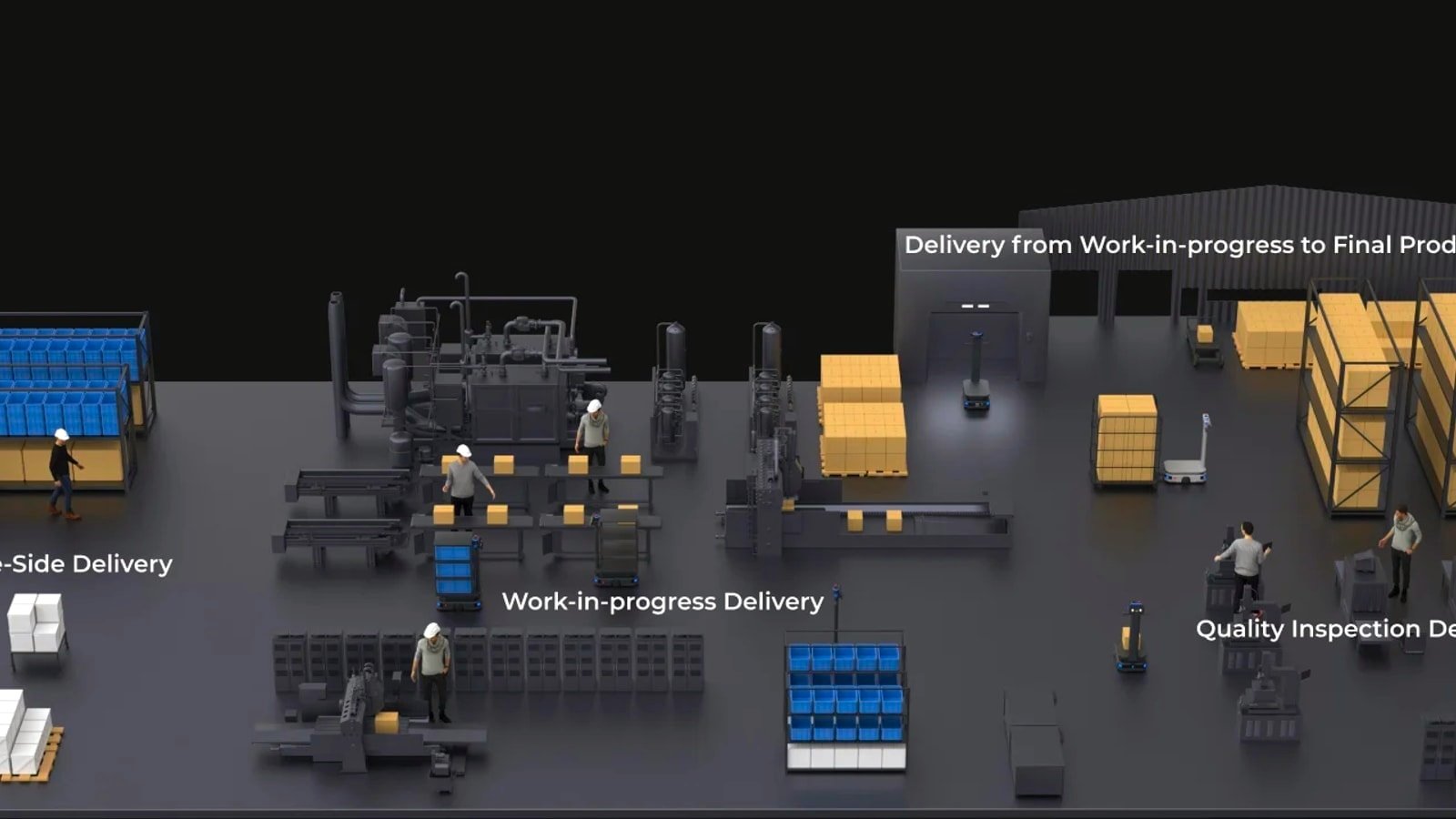
Il primo caso non dovrebbe essere il più ambizioso. Meglio scegliere un flusso ripetitivo, misurabile e poco ambiguo: trasferimento componenti da magazzino a linea, cassette tra isole, materiale di consumo, resi interni, semilavorati verso controllo qualità. L'obiettivo non è stupire, ma dimostrare che il robot riduce attrito operativo in un punto preciso.
Per Bubbles, una valutazione sensata parte dal sopralluogo: distanze, payload, frequenza, turni, pavimento, spazi di manovra, colli di bottiglia e integrazione minima. Solo dopo ha senso scegliere mezzo, accessori e software. La robotica logistica funziona quando il processo è stato disegnato abbastanza bene da lasciare al robot un lavoro chiaro.
Conclusione
Nel 2026 la domanda non è più se gli AMR siano maturi. La domanda è se l'azienda è pronta a misurare il proprio flusso con abbastanza onestà da inserirli senza creare confusione. Un robot mobile può liberare ore, ridurre attese e rendere più ordinata la logistica interna, ma solo se il turno reale diventa il banco prova.
Se vuoi capire quale missione interna ha senso automatizzare per prima, partiamo da una mappa semplice: origine, destinazione, frequenza, carico, eccezioni e operatori coinvolti. Da lì possiamo costruire una demo utile, non solo bella da vedere, e trasformarla in un progetto difendibile con una richiesta di sopralluogo.
Articoli correlati
Vedi tutti →


Serve supporto per applicare queste idee?
Il team Bubbles Technology progetta soluzioni robotiche su misura per PMI in Campania e in tutta Italia. Prenota una consulenza gratuita per discutere esigenze, ROI e roadmap.