
Nel 2026 tutti vogliono un digital twin. La domanda più utile, però, è meno brillante: serve davvero un gemello digitale vivo o basta una buona simulazione prima dell'installazione? The Robot Report, in un contributo firmato Visual Components, ricorda una distinzione che in reparto pesa molto: simulazione e digital twin non sono la stessa cosa.
La simulazione costruisce un ambiente controllato per testare layout, flussi, robot, conveyor e logiche di processo prima che il ferro arrivi in fabbrica. Il digital twin aggiunge continuità con il sistema fisico: dati reali, aggiornamento dinamico, monitoraggio e, nei casi più maturi, feedback verso il processo. Confonderli porta a preventivi gonfi, aspettative sbagliate e progetti che partono con troppa complessità.
In sintesi
Per una PMI manifatturiera la scelta non dovrebbe partire dalla tecnologia, ma dalla decisione da prendere. Se il problema è capire se una cella robotica entra nello spazio disponibile, quanto accumulo serve prima del robot o dove si formerà il collo di bottiglia, una simulazione discreta ben fatta può bastare. Se invece l'obiettivo è monitorare una linea già installata, confrontare ciclo previsto e ciclo reale, anticipare derive e migliorare continuamente il processo, allora il digital twin inizia ad avere senso.
Il punto è economico. Un modello virtuale crea valore solo se riduce un rischio reale: layout sbagliato, commissioning lungo, fermo macchina, saturazione non vista, cambio formato fragile, logica PLC non validata. Senza questa domanda iniziale, il gemello digitale diventa una dashboard elegante che nessuno usa.
Simulazione: decidere prima di comprare ferro
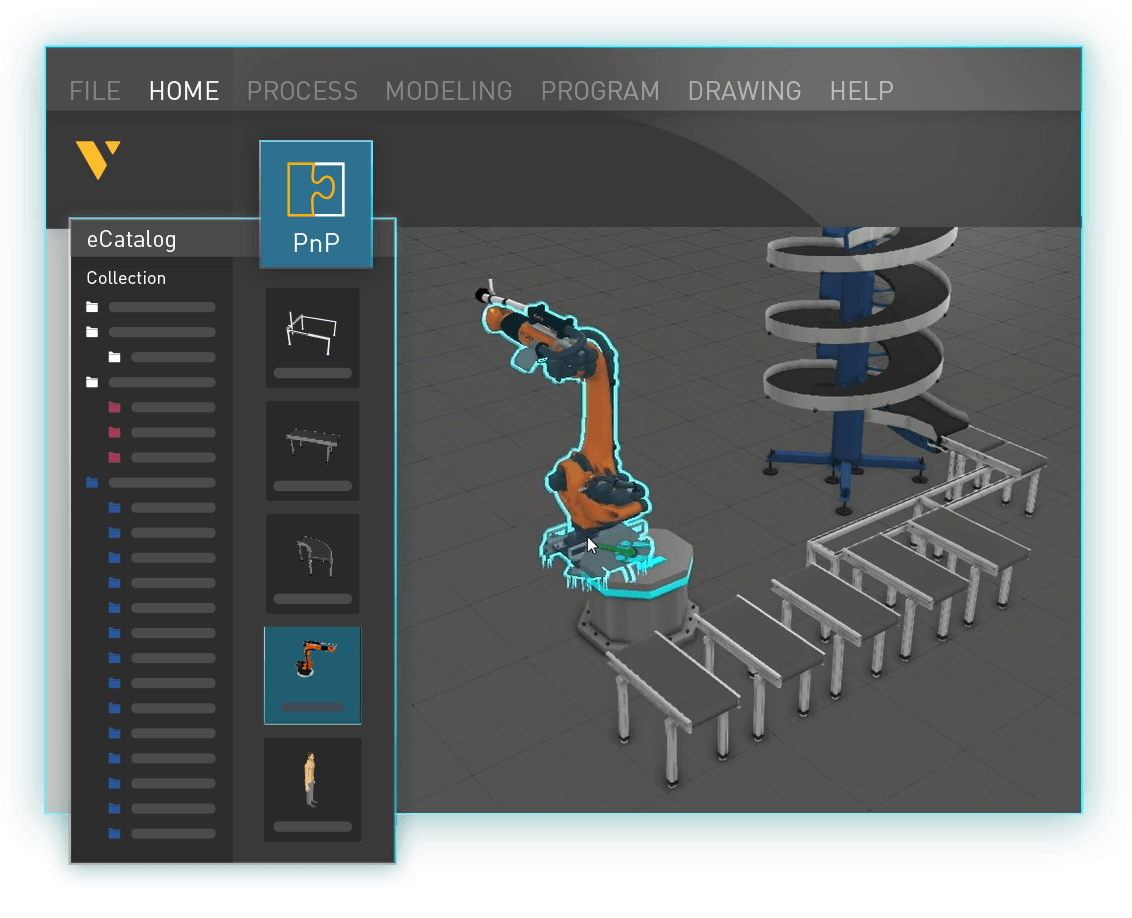
La simulazione industriale lavora bene quando il processo non è ancora installato o quando una modifica sarebbe costosa da provare dal vivo. In una cella di asservimento macchine, per esempio, permette di testare reach del robot, tempi di apertura macchina, buffer, posizioni operatore, ingombri di safety e interferenze tra utensile e fixture.
È qui che la robotica smette di essere una somma di schede tecniche. Un braccio può avere payload e ripetibilità corretti, ma restare sottoutilizzato perché il conveyor alimenta male. Un AMR può essere veloce, ma creare attese se le baie di carico sono poche. Una pinza può funzionare in demo, ma rallentare tutto se il ciclo richiede tre micro-correzioni per pezzo.
Una simulazione utile risponde a domande concrete:
- quale tempo ciclo è realistico, non solo teorico?
- dove si accumulano WIP e attese?
- il robot lavora saturo o passa metà turno fermo?
- quali varianti prodotto cambiano davvero il layout?
- il cambio formato richiede nuova programmazione o parametri chiari?
- quanto spazio serve per operatori, manutenzione e recovery?
Digital twin: continuità tra modello e linea reale
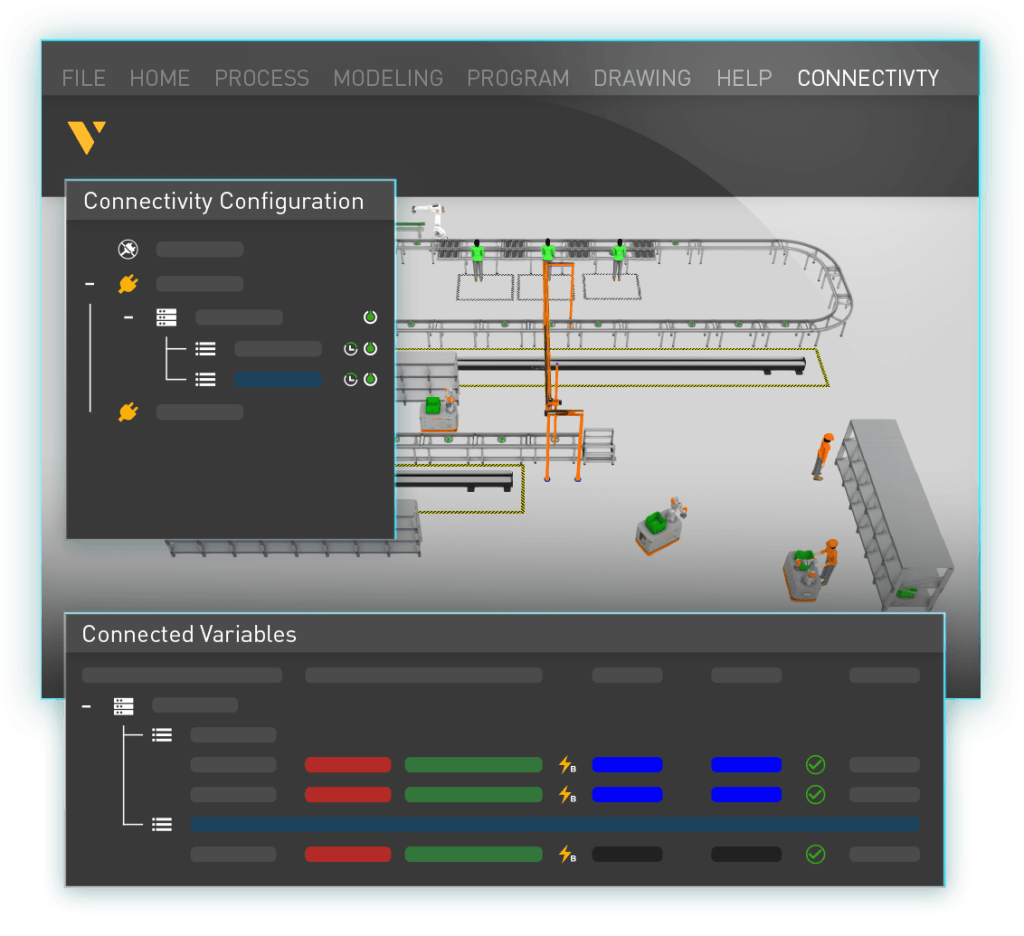
Il digital twin entra in gioco quando il modello non resta congelato. Riceve dati dalla linea, rappresenta lo stato corrente e aiuta a leggere perché il processo si comporta in un certo modo. Questa continuità può riguardare una singola macchina, una cella robotica, una flotta AMR o un intero reparto.
La differenza rispetto alla simulazione è la direzione del dato. In un modello statico decidiamo scenari e ipotesi. In un digital twin vero, il processo reale alimenta il modello: tempi ciclo, fermi, allarmi, code, scarti, velocità, stato macchina, eventi di manutenzione. Quando il collegamento è maturo, il modello può anche suggerire setpoint, finestre di manutenzione o strategie alternative.
Per una PMI questa maturità non va improvvisata. Prima servono dati affidabili e un'architettura chiara. Se il PLC non espone stati coerenti, se gli allarmi sono scritti male o se i tempi ciclo non sono tracciati, il gemello digitale eredita confusione. Vale lo stesso principio che usiamo nei progetti di assemblaggio: il software non pulisce un processo che non è stato descritto bene.
Virtual commissioning: il punto dove il modello fa risparmiare
La zona più interessante, oggi, è il virtual commissioning. Qui il modello virtuale non serve solo a mostrare la cella, ma a provare logiche, segnali e sequenze prima dell'avviamento fisico. È meno scenografico di un dashboard 3D, ma spesso porta il ritorno più rapido.
In pratica si validano:
- sequenze tra robot, PLC, visione e utensile;
- stati di partenza, arresto, recovery e reset;
- eccezioni come pezzo mancante, presa fallita o porta aperta;
- tempi di attesa tra macchina e robot;
- logiche di consenso e interlock;
- comportamento dopo perdita rete o fermo parziale.
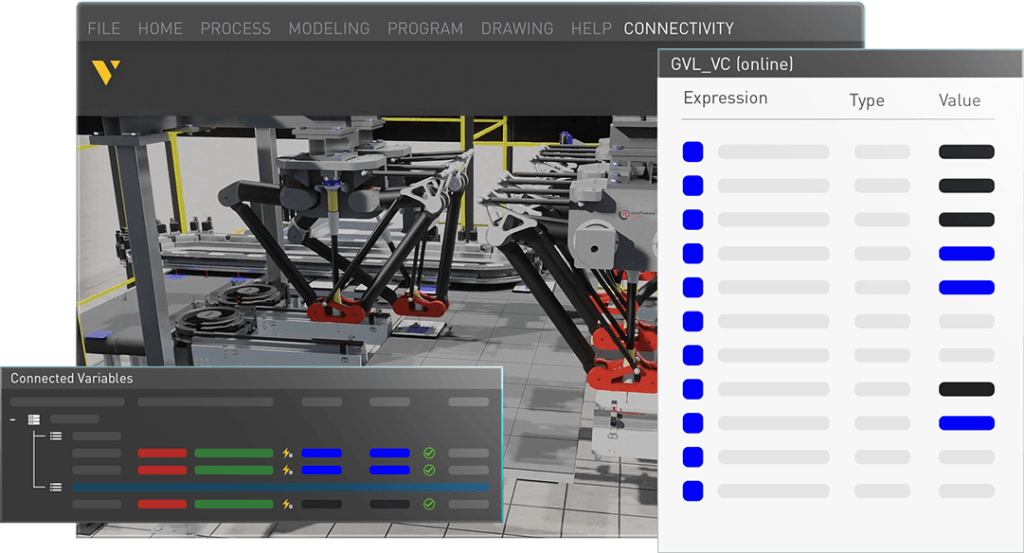
Questa fase è particolarmente utile per celle con molti attori: braccio robotico, quadro, macchina esistente, HMI, safety, sensori e qualità. In una linea di scarico e carico o di movimentazioni interne, il problema raramente è il singolo movimento. È la coreografia completa.
KPI da chiedere al fornitore
Un progetto serio di simulazione o digital twin dovrebbe uscire dalla genericità. Le domande da mettere nel capitolato sono poche, ma scomode:
| Area | KPI da chiarire | Perché conta |
|---|---|---|
| Layout | utilizzo robot, saturazione buffer, collisioni | evita celle belle ma lente |
| Commissioning | ore di debug ridotte, scenari testati | misura il risparmio reale |
| Dati | segnali disponibili, frequenza, qualità | decide se il twin può vivere |
| Recovery | stati eccezione simulati | riduce micro-fermi in turno |
| Cambio formato | tempo e parametri richiesti | protegge la flessibilità |
| Manutenzione | eventi tracciati e correlazioni | trasforma il modello in strumento operativo |
Il benchmark non deve essere "abbiamo un digital twin". Deve essere: quanto tempo abbiamo tolto al collaudo? Quanti fermi abbiamo previsto prima? Quale decisione di layout abbiamo cambiato grazie al modello? Quale dato reale aggiorna il sistema ogni giorno?
Quando non serve
Ci sono casi in cui un digital twin completo è sovradimensionato. Una singola cella semplice, con basso mix prodotto e pochi segnali, può partire meglio con una simulazione di layout, un buon FAT e una documentazione robusta. Forzare un twin sempre vivo in questi casi rischia di aggiungere manutenzione software senza beneficio proporzionato.
Il digital twin serve quando il processo cambia, quando la variabilità è alta, quando il costo del fermo è rilevante o quando i dati operativi possono guidare decisioni frequenti. Se nessuno nel team ha responsabilità, tempo e strumenti per usare quei dati, il progetto va ridimensionato.
Conclusione
La distinzione tra simulazione e digital twin non è accademica. È il modo per comprare la quantità giusta di complessità. Prima si modella per decidere meglio. Poi, se il processo lo giustifica, si collega il modello alla linea reale e lo si fa vivere.
Per Bubbles Technology la regola pratica è questa: partiamo dal rischio industriale, non dalla parola di moda. Se il problema è layout, tempo ciclo o commissioning, simuliamo. Se il problema è miglioramento continuo su una linea già ricca di dati, ragioniamo sul digital twin. La buona robotica non ha bisogno di un gemello digitale per sembrare moderna; ne ha bisogno solo quando quel gemello aiuta davvero la fabbrica a lavorare meglio.
Fonti
- The Robot Report, Simulation vs. digital twin: A strategic lens on virtual manufacturing
- Visual Components, Manufacturing simulation
- IFR, Robot Density Surges in Europe, Asia, and Americas
Articoli correlati
Vedi tutti →
Programmazione robot offline 2026: meno fermo linea, più celle replicabili

Data robotici 2026: la fabbrica che prepara la physical AI

Agenti AI in fabbrica 2026: cosa serve prima dei robot autonomi
Serve supporto per applicare queste idee?
Il team Bubbles Technology progetta soluzioni robotiche su misura per PMI in Campania e in tutta Italia. Prenota una consulenza gratuita per discutere esigenze, ROI e roadmap.