

La parola physical AI rischia di farci guardare nella direzione sbagliata. Nel 2026 il robot più interessante non è quello che promette autonomia generale, ma quello che riesce a ripetere un compito industriale sporco, variabile e misurabile senza fermare la linea. Per riuscirci servono componenti meno scenici di un video virale: pinze, sensori tattili, tool changer, controller, interfacce safety e software di messa in servizio.
Automation World, nel roundup robotico di giugno 2026, mette nello stesso quadro cobot più pesanti, fingertip tattili, piattaforme mobili modulari e SCARA con funzioni safety evolute. L'IFR, premiando Robert Little agli Engelberger Awards 2026, ha sottolineato proprio il ruolo di end-effector, force/torque sensing e cambio utensile nel rendere i robot utili in produzione. È un segnale chiaro: la prossima ondata non si decide solo sul braccio, ma su tutto ciò che sta intorno al braccio.
Il robot non è mai solo il robot
Quando una PMI valuta un progetto di assemblaggio o asservimento macchine, il braccio è spesso la parte più facile da capire. Payload, reach, ripetibilità e prezzo finiscono subito nella tabella. Ma la cella funziona o fallisce su dettagli meno fotogenici.
Una pinza sbagliata aumenta scarti e microfermi. Un sensore non robusto vede bene in demo e male quando cambia luce. Un tool changer progettato tardi trasforma un cambio formato da cinque minuti in mezz'ora di fermo. Una safety poco chiara costringe l'operatore a procedure fragili, quindi il robot viene usato meno di quanto promesso.

Per questo il confronto tra un Dobot CR5, un Dobot CR10 o una cella più tradizionale deve partire dal processo: pezzi reali, tempi ciclo reali, variazioni reali. Solo dopo ha senso parlare di intelligenza.
La physical AI ha bisogno di tatto
Il passaggio più concreto del roundup Automation World riguarda i fingertip tattili Robotiq TSF-85: pressione, vibrazione, propriocezione e slip detection portati sulla punta della pinza. Non è un gadget. È la differenza tra "chiudo la pinza" e "capisco se sto perdendo il pezzo".
In fabbrica, questo conta perché molti errori non sono errori di traiettoria. Sono errori di contatto: un pezzo unto, una scatola leggermente schiacciata, un componente orientato male, una superficie che cambia attrito. La visione può dire dove si trova l'oggetto; il tatto dice se la presa sta funzionando.
Per una PMI non significa comprare sempre la pinza più avanzata. Significa chiedere una prova precisa: quanti pezzi fuori tolleranza il sistema riesce a gestire prima di chiedere intervento umano? Se la risposta non è misurabile, la physical AI resta marketing.
Tool changer, sensori e manutenzione
Il riconoscimento IFR a Robert Little, legato a tool changer, force/torque sensing ed end-effector, ricorda una cosa semplice: l'adozione cresce quando il robot diventa adattabile senza diventare fragile. Nelle linee high-mix, un unico utensile raramente basta.
La checklist pratica dovrebbe includere almeno cinque domande.
| Area | Domanda | Prova minima |
|---|---|---|
| Presa | Il gripper regge pezzi reali sporchi, lucidi o deformati? | Lotto test con scarti e varianti |
| Cambio formato | Chi cambia utensile e in quanto tempo? | Procedura cronometrata in reparto |
| Percezione | Il sensore mantiene prestazioni con luce e polvere reali? | Test su due turni, non solo demo |
| Safety | Il ciclo rallenta o si ferma in modo prevedibile vicino alle persone? | Valutazione rischio e log eventi |
| Manutenzione | L'operatore sa ripristinare il sistema dopo errore? | Recovery guidata e training documentato |

AMR e bracci: due metà dello stesso flusso
La stessa logica vale per le piattaforme mobili. Automation World cita la piattaforma SEW MR P1600 con carichi fino a 1.600 kg, docking preciso, interfacce industriali e supporto VDA 5050. Il punto non è solo spostare un pallet. È collegare isole diverse senza creare un nuovo collo di bottiglia.
Un braccio robotico migliora la postazione; un AMR migliora il flusso. In molti stabilimenti, il valore nasce quando le due cose si parlano: un cobot carica una macchina, un AMR porta semilavorati, il WMS o il MES chiude il ciclo informativo. Qui entrano in gioco soluzioni come Pudu T300 e Pudu T600, che vanno valutate non come "mezzi autonomi" ma come nodi di un processo.
La domanda corretta diventa: il secondo robot costerà meno del primo in engineering? Se ogni cella richiede un'integrazione unica, non c'è scala. Se invece gripper, fixture, mappe, interfacce e training diventano riutilizzabili, allora la physical AI inizia a produrre margine.
Conclusione
Nel 2026 comprare robotica industriale significa comprare un sistema di dettagli. Il braccio conta, ma non basta. Sensori, pinze, tool changer, safety, recovery e flusso interno stabiliscono se il progetto resta una bella demo o diventa capacità produttiva.
Per Bubbles Technology il criterio è operativo: partire da una postazione reale, misurare il problema, scegliere il componente che riduce rischio e variabilità, poi scalare solo quando il metodo regge. Per valutare una cella o un flusso con questi criteri, il primo passo resta Richiedi Demo.
Fonti
Articoli correlati
Vedi tutti →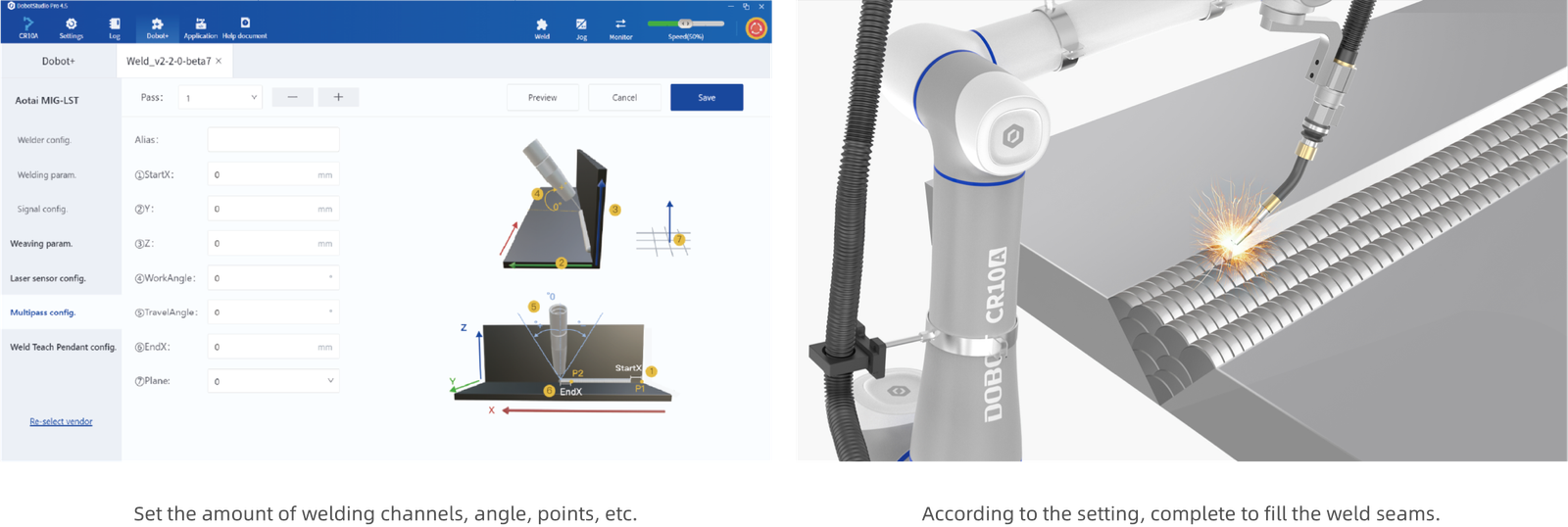
Automazione robotica della saldatura: aumento di produttivita e qualita nella fabbrica moderna

Robotica Italia 2028: la checklist per le PMI che vogliono investire bene

La scuola degli umanoidi: prima di lavorare devono imparare da noi
Serve supporto per applicare queste idee?
Il team Bubbles Technology progetta soluzioni robotiche su misura per PMI in Campania e in tutta Italia. Prenota una consulenza gratuita per discutere esigenze, ROI e roadmap.