

La notizia è meno rumorosa di un nuovo umanoide, ma per chi porta robot in produzione vale parecchio: Transitive Robotics ha annunciato Transitive 2.0, una nuova versione del suo framework open-source per la robotica full-stack. Nel riepilogo delle 10 storie robotiche di aprile 2026 di The Robot Report compare tra le storie più lette del mese proprio perché tocca un nervo scoperto: quando la flotta cresce, non basta più “collegarsi al robot”.
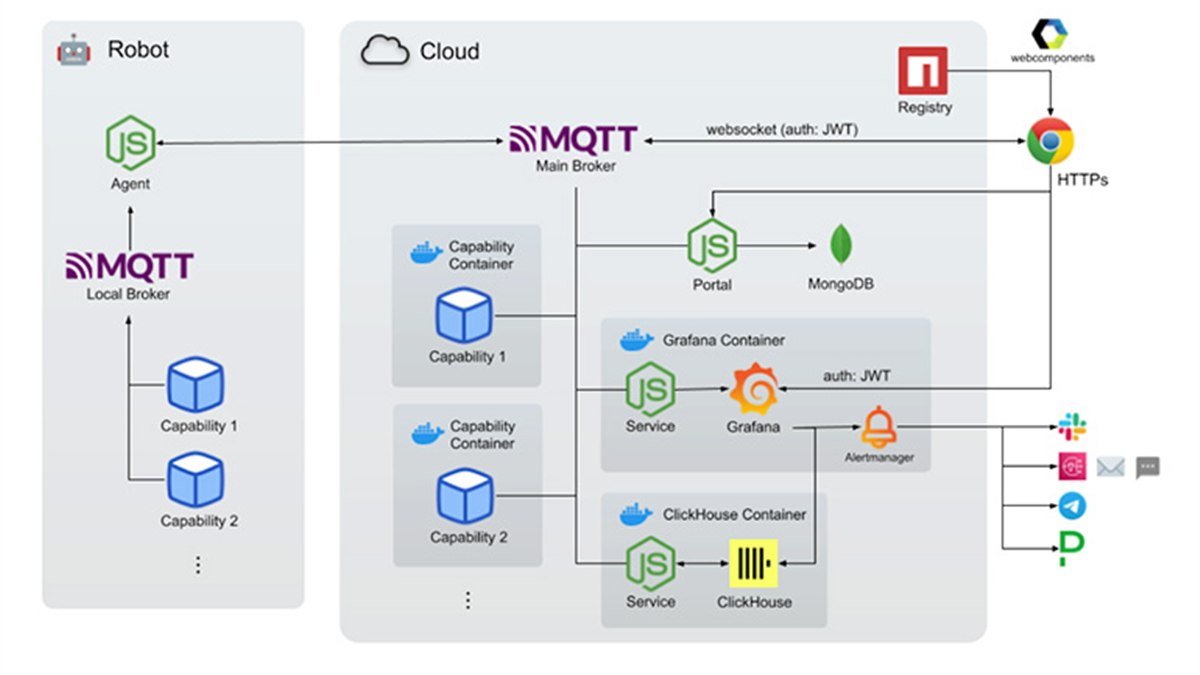
Transitive dichiara integrazioni con ClickHouse per dati storici e time-series, Grafana per visualizzazione e Alertmanager per alert personalizzati. Sono parole familiari a chi lavora con cloud, DevOps o impianti IT/OT, ma nella robotica industriale hanno un peso specifico diverso: un alert sbagliato ferma un turno, un accesso troppo largo apre un rischio safety, un log incompleto rende impossibile capire perché il robot si è bloccato alle 3:17.
In sintesi: la robotica open-source sta entrando nella fase dell’osservabilità. Per una PMI non significa “installare tool perché sono moderni”, ma chiedere che ogni progetto di movimentazione interna, asservimento macchine o ispezione produca dati leggibili, alert utili e procedure di recovery.
Perché conta: il valore di una flotta non si misura nella demo. Si misura dopo sei mesi, quando bisogna sapere quali robot lavorano, quali consumano ticket, quali task generano eccezioni e quali operatori hanno davvero bisogno di intervenire.
Dal pilot alla flotta: cambia il problema
Nel pilot il robot è ancora un oggetto. Lo guardi, lo programmi, lo affianchi a un operatore, risolvi il problema sul posto. Appena i robot diventano dieci, cinquanta o distribuiti su più reparti, diventano un sistema. A quel punto la domanda “il robot funziona?” non basta più.
Servono risposte più precise:
- quali missioni falliscono più spesso e in quale fascia oraria?
- quali errori sono meccanici, software, rete o processo?
- quanto tempo passa tra allarme, diagnosi e recovery?
- chi può vedere video, log e comandi remoti?
- cosa resta nello storico quando il turno è finito?
- quali eccezioni si ripetono abbastanza da giustificare una modifica di layout?
È qui che il software di flotta diventa infrastruttura. Non sostituisce il lavoro di integrazione, ma lo rende misurabile. Un AMR che si blocca davanti a un pallet fuori posto non è solo un incidente: è un dato sul processo. Se quel dato resta nella memoria dell’operatore, il progetto non impara. Se entra in uno storico interrogabile, può diventare una correzione di flusso.

Open-source non vuol dire improvvisato
La parola open-source può essere fraintesa. In fabbrica non è sinonimo di “gratis” né di “lo scarico e lo metto in produzione lunedì”. È un modello di trasparenza, componibilità e controllo. Può aiutare quando l’azienda non vuole restare chiusa in un’unica dashboard proprietaria, ma richiede disciplina: versioni, patch, responsabilità, hardening, backup e ruoli chiari.
Transitive cita capacità transazionali come WebRTC video streaming, Remote Teleop e ROS Tool, insieme a un protocollo dati open-source come MQTTSync e a funzioni di autenticazione e autorizzazione granulari. Il messaggio operativo è interessante: il primo capitolo della robotica connessa è “riesco a vedere e comandare il robot”; il secondo è “riesco a gestire la flotta senza guardarla tutto il giorno”.
Per Bubbles, questo cambia il modo di impostare un capitolato. In un progetto con Pudu T300, Pudu T600 o bracci collaborativi Dobot, non va chiesto solo payload, autonomia o precisione. Va chiesto anche:
| Area | Domanda da capitolato | Rischio se manca |
|---|---|---|
| Dati storici | Dove finiscono missioni, errori e stati? | Ogni problema riparte da zero |
| Alert | Chi riceve cosa e con quale priorità? | Troppi falsi allarmi, poi nessuno ascolta |
| Accessi | Chi può vedere video, log e teleoperare? | Rischio safety, privacy e OT security |
| Recovery | Cosa fa l’operatore in 3 minuti? | Fermo lungo e dipendenza dal tecnico |
| Integrazione | Come dialoga con MES, WMS o ERP? | Flotta scollegata dal processo reale |
Il dato storico è il nuovo manuale operativo
Un manuale spiega come dovrebbe comportarsi il sistema. Il dato storico mostra come si comporta davvero. Questa differenza pesa molto nei progetti robotici, perché il blocco raramente nasce dal solo robot: può arrivare da layout, traffico umano, qualità del Wi‑Fi, pallet fuori standard, ricambi non disponibili, aggiornamenti software o sequenze produttive cambiate.
L’IFR segnala per il 2026 un mercato delle installazioni robot industriali arrivato a 16,7 miliardi di dollari. Più robot entrano in produzione, più cresce il bisogno di governarli come asset industriali, non come gadget isolati. Il punto non è avere una dashboard più bella. Il punto è costruire un ciclo di miglioramento: misuro, capisco, correggo, verifico.
Qui l’open-source può dare un vantaggio concreto: permette di integrare strumenti già noti al mondo software e dati, evitando che ogni progetto robotico diventi un’isola. Ma il beneficio arriva solo se qualcuno disegna l’architettura prima del go-live. Altrimenti ci si ritrova con tre dashboard, due VPN, log sparsi e nessun proprietario del dato.
Checklist per comprare robot senza perdere controllo
Prima di scalare una flotta, consigliamo una checklist semplice ma severa:
- ogni robot produce log consultabili anche dopo il turno?
- gli eventi hanno timestamp, missione, codice errore e contesto operativo?
- gli accessi remoti sono nominativi, revocabili e tracciati?
- l’operatore può fare recovery senza chiamare sempre l’integratore?
- le dashboard separano stato tecnico, KPI produttivi e alert safety?
- esiste una procedura di aggiornamento software con rollback?
- il dato di flotta può alimentare manutenzione, layout e formazione?
- il progetto funziona anche se la connettività degrada?
Se la risposta è no a molte di queste domande, il progetto non è ancora pronto per la scala. Può essere un buon pilot, ma non una flotta industriale.
Conclusione
La robotica open-source non è il titolo più appariscente della settimana, ma racconta una svolta importante: il robot da solo non basta più. La fabbrica vuole sistemi osservabili, sicuri, integrati e migliorabili.
Per chi investe in automazione, la scelta più prudente non è aspettare il robot perfetto. È progettare fin dall’inizio come verranno gestiti dati, alert, recovery e accessi. Se stai valutando una flotta AMR, una cella cobot o un progetto di ispezione, partiamo dal processo e dall’architettura software: il robot è la parte visibile, ma il controllo nasce dietro le quinte.
Articoli correlati
Vedi tutti →
Affidabilità robotica 2026: i KPI prima della flotta

IFR cambia guida: cosa segnala Jane Heffner alla robotica industriale

Robotica Italia 2028: la checklist per le PMI che vogliono investire bene
Serve supporto per applicare queste idee?
Il team Bubbles Technology progetta soluzioni robotiche su misura per PMI in Campania e in tutta Italia. Prenota una consulenza gratuita per discutere esigenze, ROI e roadmap.