Il no-code sta arrivando anche nella robotica industriale, ma non nel modo superficiale che molti immaginano. Non significa premere un pulsante e vedere un robot lavorare in autonomia il giorno dopo. Significa piuttosto spostare il lavoro difficile: meno codice scritto a mano per ogni singolo caso, più orchestrazione di componenti già pronti, simulazione preventiva, monitoraggio continuo e governance del rollout.
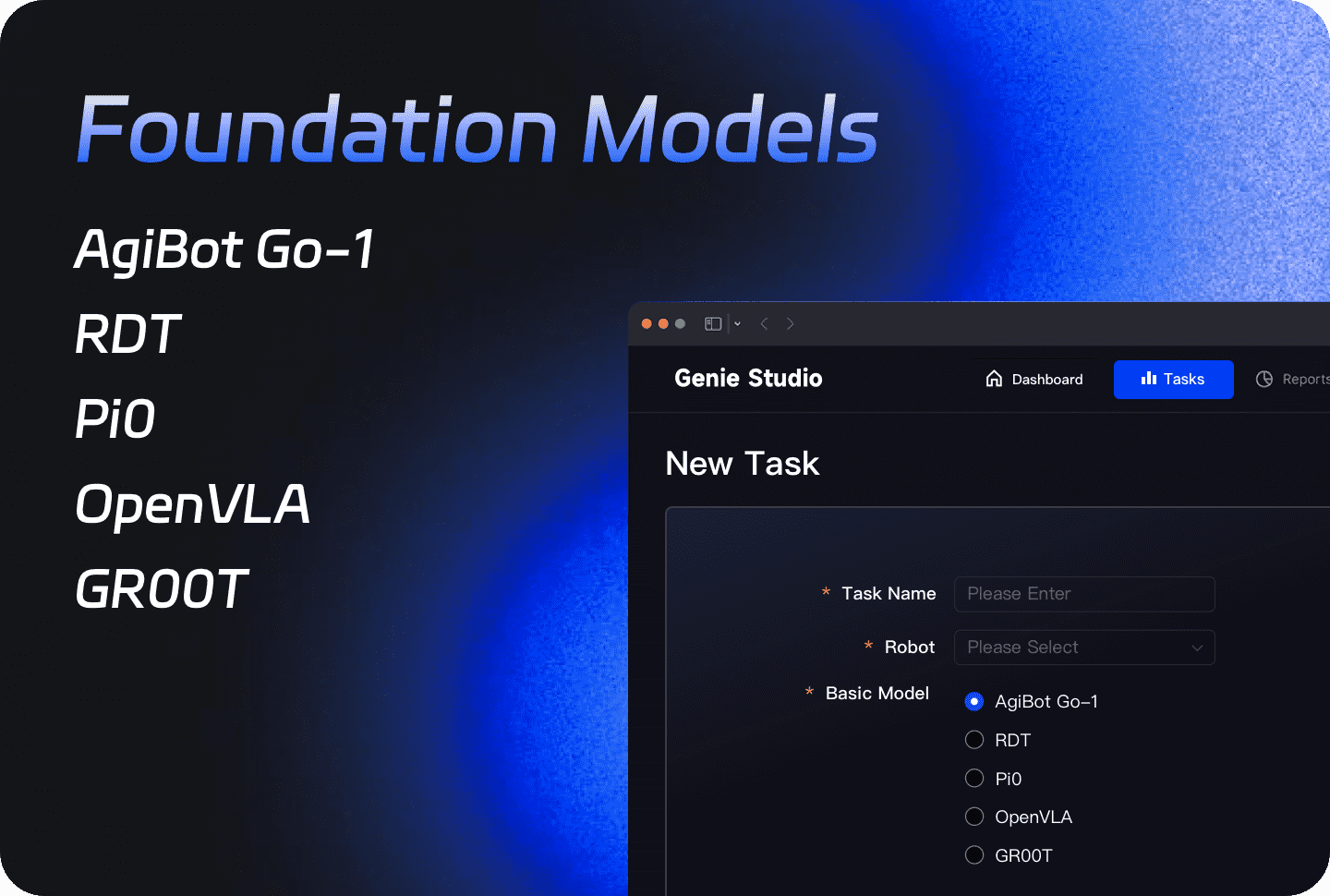
Il tema è tornato centrale dopo il lancio di Genie Studio Agent da parte di AGIBOT il 13 aprile 2026, una piattaforma che promette workflow zero-code o low-code per deployment robotici basati su perception, motion control, navigation, Vision-Language-Action e reinforcement learning. Sullo sfondo c'è una pressione industriale reale: secondo l'IFR, l'UE-27 è arrivata a 231 robot ogni 10.000 addetti manifatturieri, sopra la media globale di 132. Tradotto: i robot crescono, ma il vero collo di bottiglia si sposta sull'industrializzazione del software che li porta in produzione.
Perché il no-code robotico arriva adesso
Per anni la promessa è stata la stessa: ridurre la dipendenza da team di integrazione enormi. Il problema è che la robotica reale non è un gestionale. Un'app enterprise può tollerare qualche bug minore; una cella robotica, un AMR o un sistema embodied AI no. Ogni errore si traduce in fermo impianto, collisioni, rilavorazioni o throughput perso.
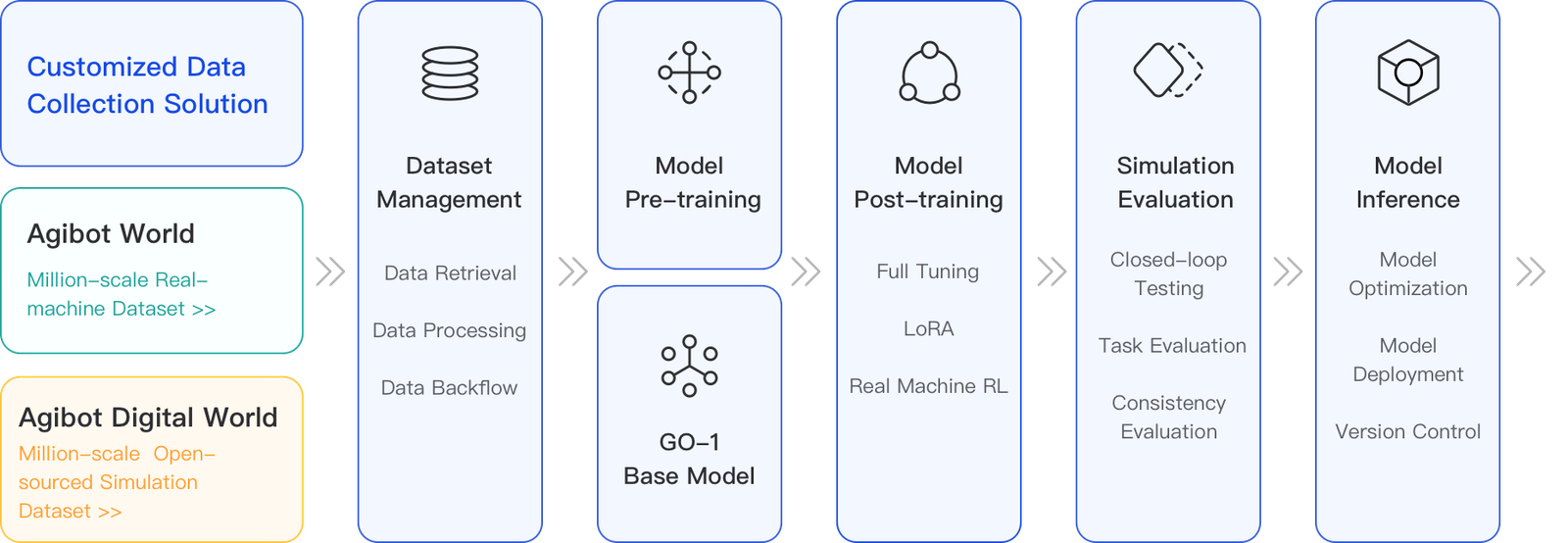
Nel 2026, però, qualcosa cambia davvero. Le nuove piattaforme non si limitano a “nascondere il codice”: impacchettano blocchi funzionali maturi. Nel caso di AGIBOT, The Robot Report descrive un framework con componenti riutilizzabili per perception, motion control, navigation, VLA e RL, collegabili tramite editor visuale drag-and-drop. Nella pagina ufficiale di Genie Studio compaiono anche numeri concreti che fanno capire la direzione del mercato: fino a 1.000 throughput giornalieri per device nella data collection, 8.000+ asset e scenari per simulazione e valutazione, più una pipeline di one-click deployment con performance dichiarate 2-3 volte superiori rispetto a soluzioni single-GPU tradizionali.
Questo punto è decisivo per chi lavora in manifattura. Se ogni nuova variante di task richiede settimane di scripting, tuning e test su impianto, il robot resta un progetto speciale. Se invece esistono template riutilizzabili, librerie di skill, simulazione coerente e rollback ordinato, il deployment inizia a somigliare a un processo industriale.
Cosa accelera davvero — e cosa no
La parte credibile del no-code non è l'assenza di codice: è la riduzione del codice fragile. AGIBOT insiste su quattro leve che meritano attenzione perché rispondono a problemi reali di fabbrica.
La prima è la workflow orchestration. Invece di scrivere ogni volta un connettore nuovo tra visione, pianificazione, motion e grasping, il team può assemblare blocchi già definiti. Questo taglia i tempi di commissioning solo se i blocchi sono già testati su casi reali.
La seconda è l'approccio simulation-first. Qui il vantaggio è molto concreto: task execution, path planning e interazioni vengono validate prima dell'arrivo in linea. In un impianto che fa asservimento macchine o handling ripetitivo, ridurre il debugging on-site vale più di mille promesse di AI generativa.
La terza è il continuous optimization. Portare reinforcement learning e feedback real-time nel ciclo operativo può migliorare grasping, placement e robustezza, ma solo se l'azienda dispone di metriche chiare, dati puliti e limiti di sicurezza non negoziabili.
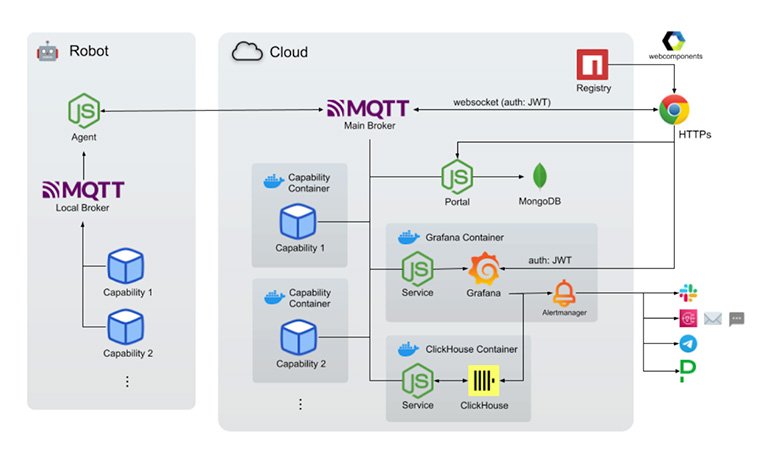
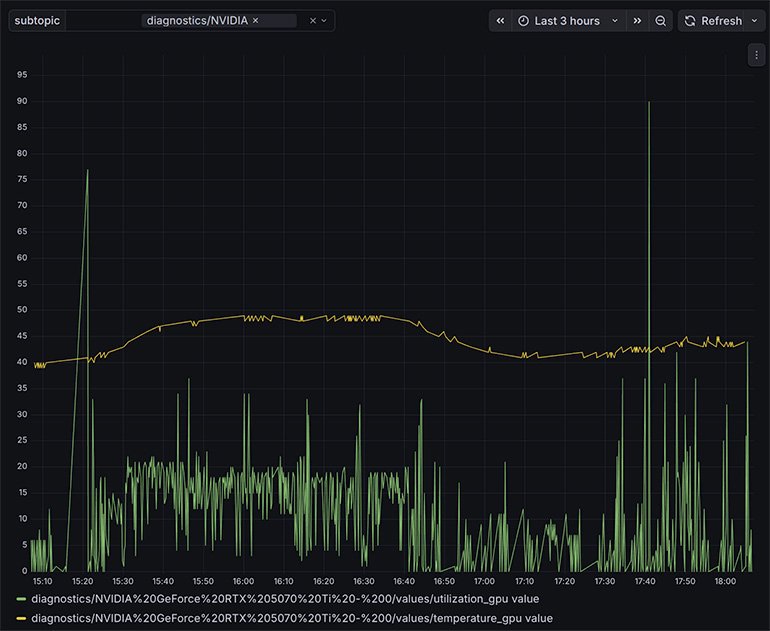
La quarta, spesso sottovalutata, è il monitoraggio post-deployment. Ed è qui che il mercato si sta facendo più maturo. Non a caso, il 13 aprile anche Transitive 2.0 ha annunciato integrazioni con ClickHouse, Grafana e Alertmanager per portare telemetria storica, dashboard e alerting dentro la gestione delle flotte. The Robot Report osserva che le capability di Transitive sono particolarmente utili per aziende che non hanno ancora superato flotte di 50 robot, ma che devono iniziare a ragionare su storico, anomalie e accessi granulari.
Quindi sì, il no-code accelera. Ma accelera soprattutto in tre zone precise:
- task ripetitivi con variabilità controllata;
- rollout multi-sito dove conviene standardizzare template e governance;
- casi in cui la simulazione anticipa davvero i problemi del reale.
Non accelera, invece, dove il processo è caotico, il layout cambia ogni due giorni, gli operatori non sono allineati e il dato di partenza è sporco. In questi contesti il rischio è comprare un'interfaccia elegante per nascondere un'integrazione ancora acerba.
I KPI da chiedere prima di firmare
Un plant manager o un responsabile operations non dovrebbe chiedere “quanto è intelligente la piattaforma?”, ma “quanti giorni mi fa risparmiare senza aumentare il rischio?”. Le metriche giuste sono più terra-terra e molto più utili.
| KPI | Perché conta | Soglia pratica da monitorare |
|---|---|---|
| Lead time di deployment | Misura il tempo dal kickoff al primo task stabile | settimane, non trimestri, per use case standardizzati |
| Ore di debugging on-site | È il costo nascosto del rollout | deve calare iterazione dopo iterazione |
| Tempo di changeover | Dice quanto il sistema regge nuove SKU o nuove varianti | da misurare su cambio lotto o cambio presa |
| Tasso di fallback manuale | Mostra se il robot regge davvero il flusso reale | se cresce oltre il previsto, il no-code non sta industrializzando nulla |
| MTTR software | Tempo medio di ripristino dopo errore | decisivo nelle linee con finestre strette |
| Tempo di training operatori | Valuta se il sistema è davvero adottabile | deve essere compatibile con turnazione reale |
Se state valutando applicazioni di manipolazione o handling, questi KPI vanno letti insieme alla soluzione fisica. Un deployment “rapido” su un hardware inadatto resta un errore rapido. Ecco perché, nei progetti di assemblaggio o automazione collaborativa, noi guardiamo sempre l'abbinata tra software, cinematica, sensori e processo operativo.
Dove il no-code ha senso per le PMI italiane
Per una PMI manifatturiera italiana il vero vantaggio non è avere l'ultima buzzword in brochure. È poter replicare un'applicazione buona senza ricominciare ogni volta da capo. Qui il no-code serio diventa interessante in quattro scenari.
Il primo è la replicazione intra-gruppo: stessa famiglia di task, stabilimenti diversi, parametri diversi ma logica comune. Il secondo è la governance multi-fornitore, quando servono interfacce leggibili anche per chi non vive di ROS, script e middleware. Il terzo è la riduzione del debito operativo, perché monitoraggio e alerting integrati evitano di scoprire i problemi solo quando il turno notte chiama. Il quarto è l'avvicinamento dell'utente di processo al deployment, senza chiedergli di diventare sviluppatore.
Attenzione, però: spostare il baricentro verso l'utente di processo non significa eliminare l'ingegneria. Significa usarla meglio. Le aziende che otterranno valore nel 2026 non saranno quelle che cercano “robot senza integratori”, ma quelle che costruiscono una governance più intelligente tra integratori, operatori, dati e monitoraggio.
Per questo, se il vostro obiettivo è passare da demo a messa in esercizio stabile, conviene ragionare subito su tre livelli:
- stack tecnico: modelli, simulatori, telemetria, sicurezza, rollback;
- stack operativo: chi approva modifiche, chi legge gli alert, chi decide il fallback;
- stack economico: dove misurate payback, ore risparmiate e capacità recuperata.
Quando questi tre livelli sono allineati, il no-code smette di essere marketing e diventa acceleratore. Quando non lo sono, resta solo un modo elegante per spostare in avanti i problemi.
Conclusione
La novità del 2026 non è che la robotica industriale diventi improvvisamente semplice. La novità è che il mercato sta finalmente costruendo strumenti per standardizzare il deployment, non solo per addestrare modelli più sofisticati. È un passaggio importante, ma va giudicato con occhi da fabbrica: meno slogan, più KPI, più monitoraggio, più disciplina di rollout.
Se state valutando come portare robot collaborativi, manipolazione intelligente o nuove logiche di orchestrazione in produzione senza trasformare ogni prova in un progetto infinito, il momento giusto per parlarne è adesso. Potete partire da un caso concreto oppure scriverci da qui: Richiedi Demo.
Articoli correlati
Vedi tutti →
Cobot fuori automotive: la guida PMI per investire bene nel 2026

IFR cambia guida: cosa segnala Jane Heffner alla robotica industriale

Robotica Italia 2028: la checklist per le PMI che vogliono investire bene
Serve supporto per applicare queste idee?
Il team Bubbles Technology progetta soluzioni robotiche su misura per PMI in Campania e in tutta Italia. Prenota una consulenza gratuita per discutere esigenze, ROI e roadmap.