

Per anni abbiamo misurato i robot industriali con una domanda semplice: quanti pezzi all'ora producono? Nel 2026, per molte PMI manifatturiere, la domanda più utile è un'altra: quanto velocemente la cella cambia lavoro senza chiamare ogni volta l'integratore?
Automation World ha sintetizzato bene il cambio di fase: i produttori cercano robot più adattivi perché cicli di vita dei prodotti più brevi, più varianti e cambi formato frequenti stanno rendendo meno efficace la robotica pensata per una sola ricetta stabile. Non significa che precisione e ripetibilità siano diventate secondarie. Significa che, in una fabbrica high-mix, la ripetibilità deve convivere con riconfigurazione, percezione e utensili modulari.
In sintesi
Un robot adattivo è una cella con interfacce standard, utensili sostituibili, visione robusta, sensori di forza quando servono e programmazione accessibile. Il ROI non si valuta solo sul tempo ciclo nominale, ma su downtime da cambio formato, scarti da riavvio, tempo di validazione e numero di SKU gestibili senza rifare l'impianto.
Perché il cambio formato è diventato il vero costo
Nelle grandi serie, il robot vince quando ripete lo stesso gesto milioni di volte. Nei lotti piccoli, invece, il costo si sposta: fermo linea, regolazioni, fixture, prove qualità, aggiornamento programma, training operatori e micro-errori dopo il riavvio. Una cella che produce velocemente ma richiede mezza giornata per cambiare famiglia prodotto può avere un OEE peggiore di una cella più lenta ma riconfigurabile in modo disciplinato.
È qui che la parola “adattivo” va trattata con cautela. Non basta aggiungere AI al controller. Serve un'architettura di cella che separi ciò che deve restare stabile da ciò che deve cambiare: robot, tavola, pinze, ricette, visione, logica PLC, HMI, safety e qualità.
Per una PMI, la metrica da mettere nel capitolato è concreta: minuti di changeover assistito, numero di varianti validate, tempo per creare una nuova ricetta, numero di interventi manuali e percentuale di scarti nei primi cinquanta pezzi dopo il cambio.

Tool changer, pinze e interfacce: la flessibilità parte dalla meccanica
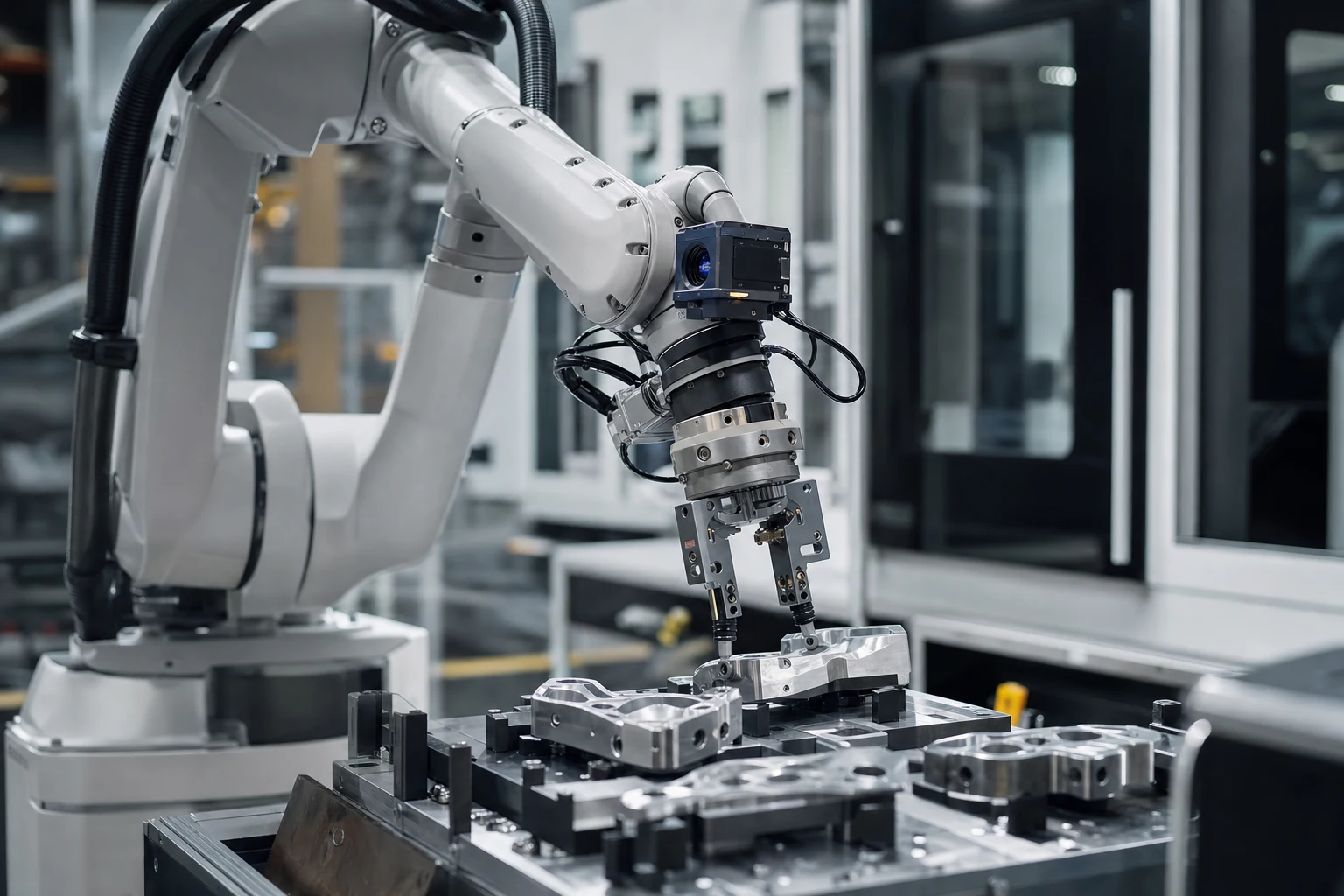
Automation World cita un punto molto pratico: i fornitori stanno semplificando la flessibilità con interfacce standardizzate, moduli di presa, passaggi pneumatici ed elettrici e sistemi di cambio utensile più rapidi. È un dettaglio apparentemente “hardware”, ma decide se una cella può davvero passare da una famiglia prodotto all'altra. Non è un tema laterale: la lettura sugli Engelberger Awards 2026 mostra proprio perché tool changer, end-effector e sensori forza/coppia sono spesso il confine tra demo e applicazione industriale.
In una linea di assemblaggio, per esempio, la pinza per inserire un componente fragile non è la stessa che serve per orientare una staffa metallica. In asservimento macchine, il problema può essere il cambio tra grezzi, semilavorati e pezzi finiti. In scarico e carico, la presa deve convivere con lubrificante, bave, tolleranze e pallet non sempre perfetti.
Il rischio è comprare un robot “flessibile” e poi bloccarlo con una pinza monouso. La regola operativa è semplice: prima si disegna la famiglia di prese e interfacce, poi si sceglie il braccio. Il robot è importante, ma la variabilità la assorbono utensile, fixture, visione e procedura.
Low-code non vuol dire senza ingegneria
La seconda leva è la programmazione. Piattaforme low-code e wizard di configurazione possono ridurre la dipendenza da codice custom, soprattutto in palletizzazione, pick-and-place, tending e applicazioni ripetibili con molte varianti. Il valore non è “chiunque programma il robot in cinque minuti”; il valore è che l'operatore esperto del processo può cambiare una ricetta senza aprire un progetto software completo.
Qui serve governance. Ogni modifica deve lasciare traccia: chi l'ha fatta, per quale prodotto, con quale versione della ricetta, dopo quale controllo qualità. Se la cella diventa facile da modificare ma difficile da auditare, il vantaggio si trasforma in rischio. Per questo un buon progetto low-code prevede ruoli, approvazioni, backup ricette, simulazione e rollback.
Un approccio utile è dividere le modifiche in tre livelli:
- parametri operatore: dimensioni scatola, schema pallet, velocità entro limiti validati;
- ricette di processo: nuove varianti approvate da manutenzione, qualità o industrializzazione;
- logica di cella: modifiche di safety, PLC, traiettorie critiche e interblocchi, sempre gestite da tecnici qualificati.
Così la flessibilità non scavalca la sicurezza. La rende gestibile.
Visione AI e forza: adattarsi alla variabilità reale
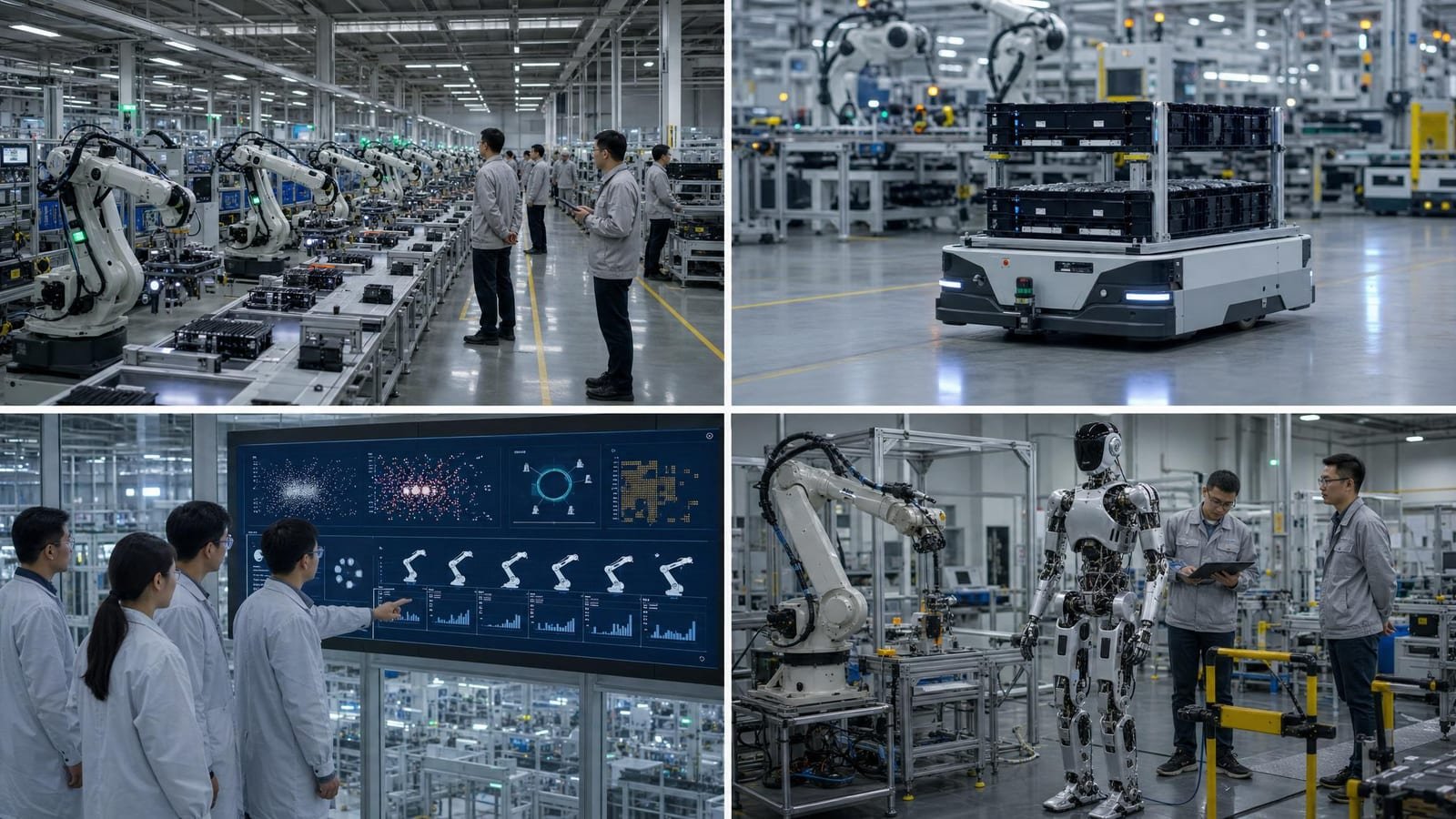
La terza leva è sensoriale. Visione avanzata, AI e sensori forza/coppia aiutano il robot a gestire differenze reali: posizioni leggermente diverse, tolleranze, deformazioni, materiali che non rispondono sempre nello stesso modo. Questo è il punto in cui la physical AI smette di essere una parola da conferenza e diventa un requisito di processo.
La visione riconosce dove si trova il pezzo e in che orientamento arriva. Il sensore di forza capisce se il contatto sta avvenendo nel modo previsto. L'AI può aiutare a classificare difetti, pattern o anomalie, ma deve stare dentro una catena validabile: illuminazione, ottica, dati, soglie, log e reazione macchina.
Il Manufacturing Leadership Council descrive l'AI come una componente sempre più centrale della fabbrica futura. Automation World riporta anche il dato, tratto da quel contesto, secondo cui il 22% dei produttori pianifica l'adozione di physical AI entro due anni. Il numero va letto come direzione, non come garanzia: molte aziende vogliono adottarla, poche hanno già dati, competenze OT e casi d'uso abbastanza stretti da farla funzionare al primo colpo. Per i task contact-rich, il focus su RLDX-1 e mani robotiche chiarisce perché torque, tatto e memoria operativa contano quanto la visione.
La checklist per una cella adattiva seria
Prima di acquistare robot, sensori o software, conviene fare una prova di realtà. Una cella è davvero adattiva se supera almeno queste domande:
- quali famiglie prodotto deve gestire nei prossimi 24 mesi?
- quante prese diverse servono e quali possono condividere lo stesso utensile?
- quanto tempo massimo è accettabile per cambio formato e riavvio qualità?
- quali parametri può modificare un operatore senza rischio?
- quali modifiche richiedono approvazione tecnica o qualità?
- la visione lavora con luce, sporco, riflessi e variabilità reali?
- la cella conserva storico ricette, allarmi, scarti e interventi?
- esiste una procedura di rollback se una ricetta nuova peggiora il processo?
- il fornitore può dimostrare la variante peggiore, non solo quella più facile?
- il ROI include fermi cambio formato, non solo pezzi/ora nominali?
Queste domande valgono per bracci robotici tradizionali, cobot e celle ibride. Cambiano payload, velocità e safety; non cambia la logica industriale.
Conclusione
La robotica adattiva non promette una fabbrica magica dove il robot capisce tutto da solo. Promette qualcosa di più utile: ridurre il costo nascosto della varietà. Per chi produce molti codici, piccoli lotti o varianti frequenti, è spesso lì che si decide il ROI.
Il punto non è comprare “il robot più intelligente”, ma progettare una cella dove meccanica, software, sensori e persone possano cambiare insieme senza perdere controllo. Se vuoi capire quale processo può diventare adattivo nella tua linea, parliamone: il primo sopralluogo serve a misurare la variabilità, non a scegliere subito il braccio.
Fonti consultate
Articoli correlati
Vedi tutti →
Robotica Italia 2028: la checklist per le PMI che vogliono investire bene
Cina e robotica AI: il piano che conta

Agile Robots e thyssenkrupp Automation 2026: perché l’integrazione conta più dell’hype AI
Serve supporto per applicare queste idee?
Il team Bubbles Technology progetta soluzioni robotiche su misura per PMI in Campania e in tutta Italia. Prenota una consulenza gratuita per discutere esigenze, ROI e roadmap.