H1 / H1-2
Research Grade Humanoid
Primi umanoidi full-size a correre. 3.3 m/s, coppia fino a 360 N·m e piattaforma per ricerca avanzata.
H1 Research Grade
Il primo robot umanoide full-size che può correre: prestazioni di potenza leader mondiale, record di velocità 3.3m/s e tecnologie all'avanguardia per ricerca estrema.
H1 Standard
H1-2 Advanced
Capacità Estreme
Velocità Umanoide
Performance Estreme
Evoluzione continua attraverso aggiornamenti OTA
V1.0 - Prestazioni Potenza
Massime prestazioni di coppia e velocità
V2.0 - Corsa Autonoma
Primo robot full-size che può correre
Specifiche Research
Ingegneria estrema per ricerca avanzata
H1 Standard
Dimensioni
Prestazioni
H1-2 Advanced
Dimensioni
Bracci
Applicazioni Research
Perfetto per università, centri R&D e laboratori di ricerca avanzata
Ricerca Universitaria
Algoritmi di controllo, AI embodied, biomeccanica
Laboratori R&D
Prototipazione rapida, test performance estreme
Sviluppo Industriale
Applicazioni commerciali, validazione prodotti

Unitree H1 Parameter
Riepilogo delle specifiche principali

| Parametro | H1 | H1-2 |
|---|---|---|
| Key Dimensions | (1520+285)mm x 570mm x 220mm | (1503+285)mm x 510mm x 287mm |
| Thigh and Calf Length | 400mm x 2 | 400mm x 2 |
| Total Arm Length | 338mm x 2 | 685mm |
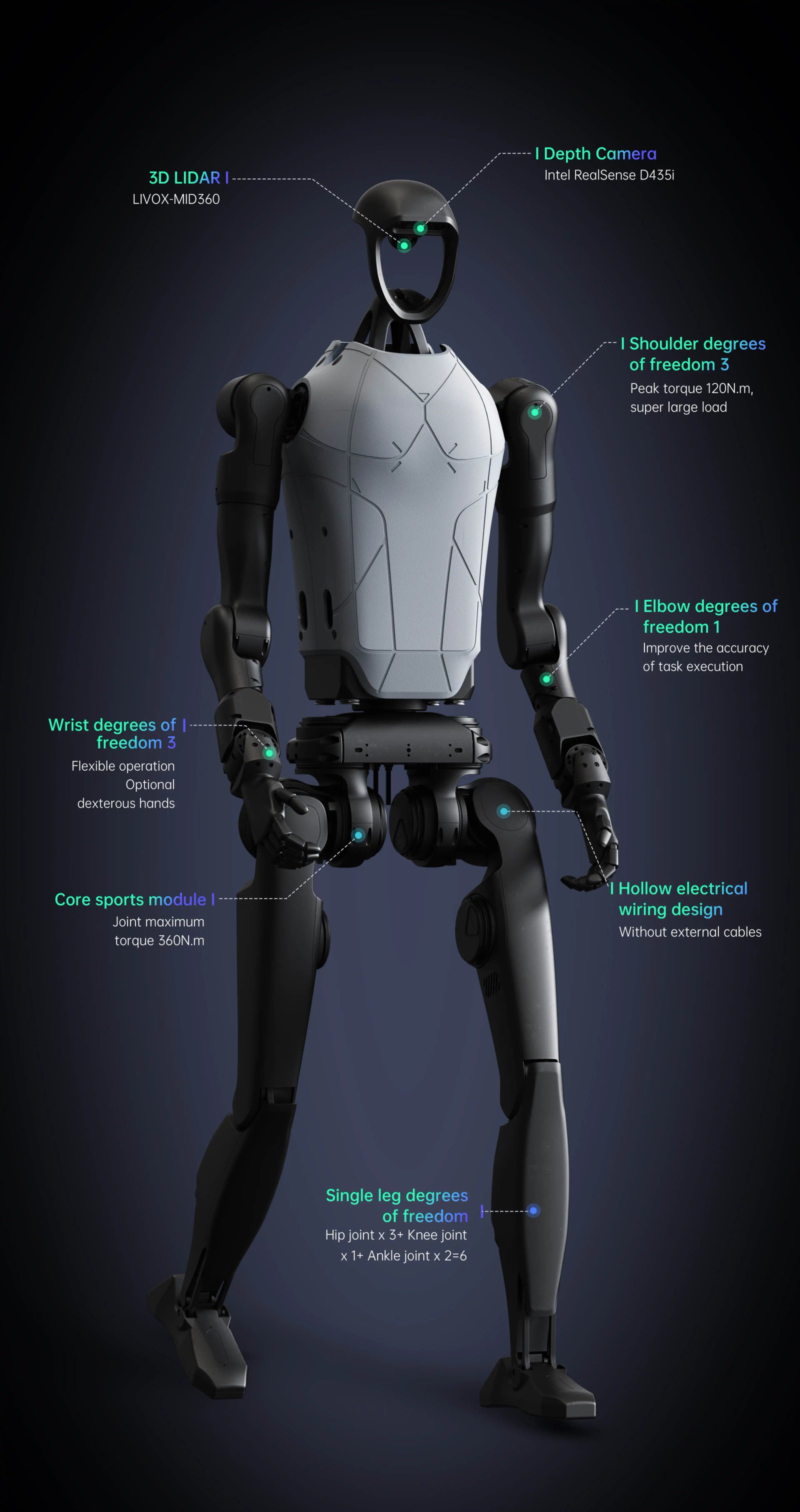
| DOF of Each Leg | 5 (Hip x 3 + Knee x 1 + Ankle x 1) | 6 (Hip x 3 + Knee x 1 + Ankle x 2) |
| DOF of Each Arm | 4 (Expandable) | 7 (Shoulder x 3 + Elbow x 1 + Wrist x 3) |
| Total Weight | About 47kg | About 70kg |
| Joint output bearing | Industrial grade crossed roller bearings (high precision, high load capacity) | Industrial grade crossed roller bearings (high precision, high load capacity) |
| Core Joint motor | Low inertia high-speed internal rotor PMSM (permanent magnet synchronous motor, better response speed and heat dissipation) | Low inertia high-speed internal rotor PMSM (permanent magnet synchronous motor, better response speed and heat dissipation) |
| Ultimate Torque of Joint Unit | Knee Torque About 360N·m, Hip Joint Torque About 220N·m, Ankle Torque About 59N·m, Arm Joint Torque About 75N·m | Knee Torque About 360N·m, Hip Joint Torque About 220N·m, Waist Joint About 220N·m, Ankle Joint About 75x2N·m |
| Mobility | Moving speed of 3.3m/s (world record), Potential mobility > 5m/s | Moving speed <2m/s |
| Battery | Battery capacity 15Ah (0.864KWh), Max Voltage 67.2V | Battery capacity 15Ah (0.864KWh), Max Voltage 67.2V |
| Control and Perception Computing Power | Standard configuration: Intel Core i5 (Platform Function), Intel Core i7 (User Development). Optional: Intel Core i7 or Nvidia Jetson Orin NX | Standard configuration: Intel Core i5 (Platform Function), Intel Core i7 (User Development). Optional: Intel Core i7 or Nvidia Jetson Orin NX (up to three) |
| Sensor Configuration | 3D LIDAR + Depth Camera | 3D LIDAR + Depth Camera |
| Dexterous Hand | Optional | Optional Dex5-1 or other ambidextrous hands |
| Arm joint performance (peak torque) | / | Shoulder: About 120N·m, Elbow: About 120N·m, Wrist: About 30N·m |
| Arm normal load | / | Peak: About 21Kg; Rated: About 7Kg |
Note: The product continues to iterate and optimize; specs may vary on actual units. Contact us for official datasheets.
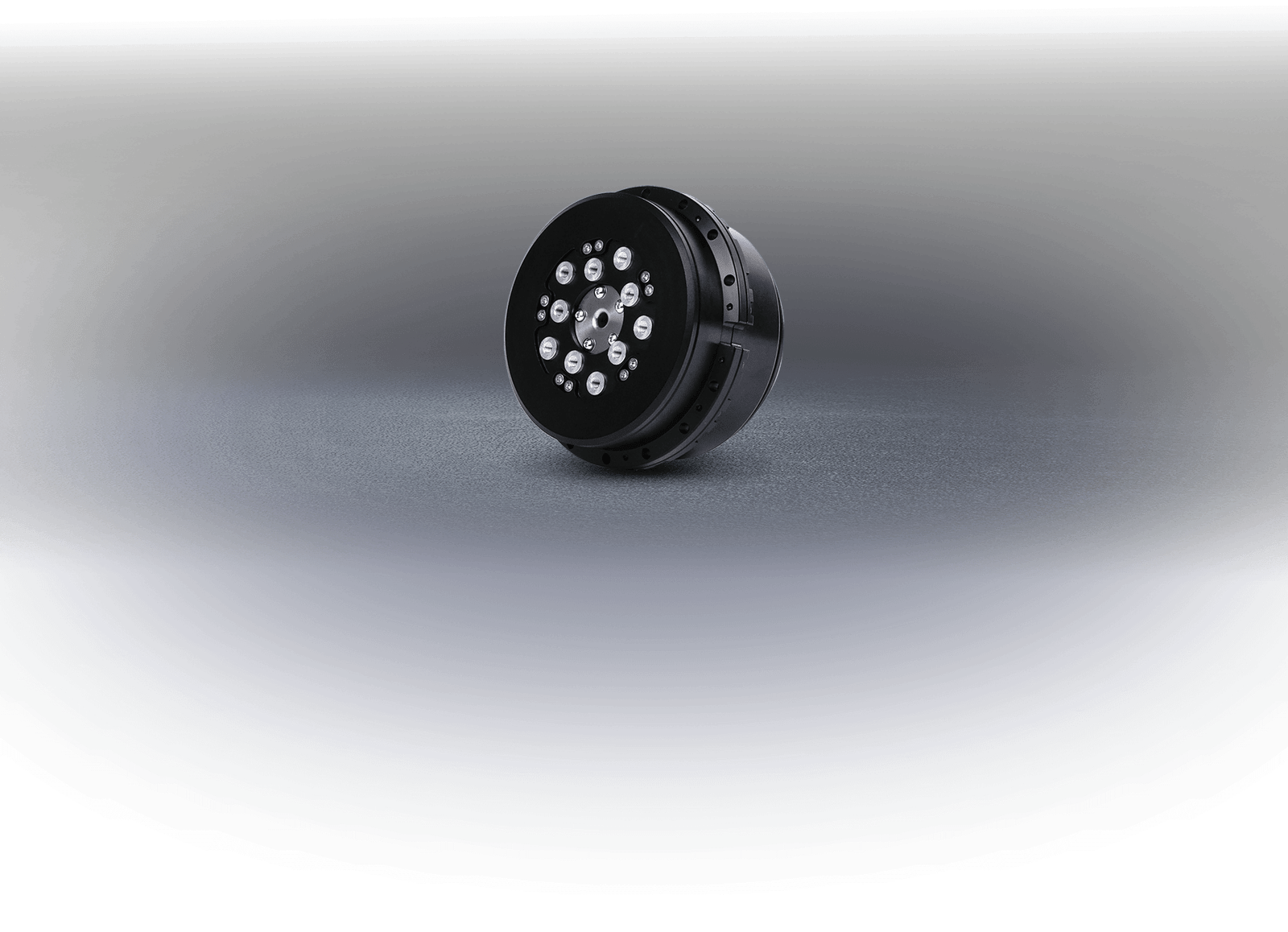
M107 PK International mainstream joint motor


| Product | M107 | T-1 | T-2 |
|---|---|---|---|
| Maximum torque OR pulling force (3.5cm arm equivalent) |
360 N·m 10000 N |
180 N·m | 8000 N |
| Weight | 1.9kg | 2.26kg | 2.2kg |
| Maximum Torque or Tension/ Weight Ratio | 189 5263 |
79 | 3636 |
| Hollow shaft | YES | YES | — |
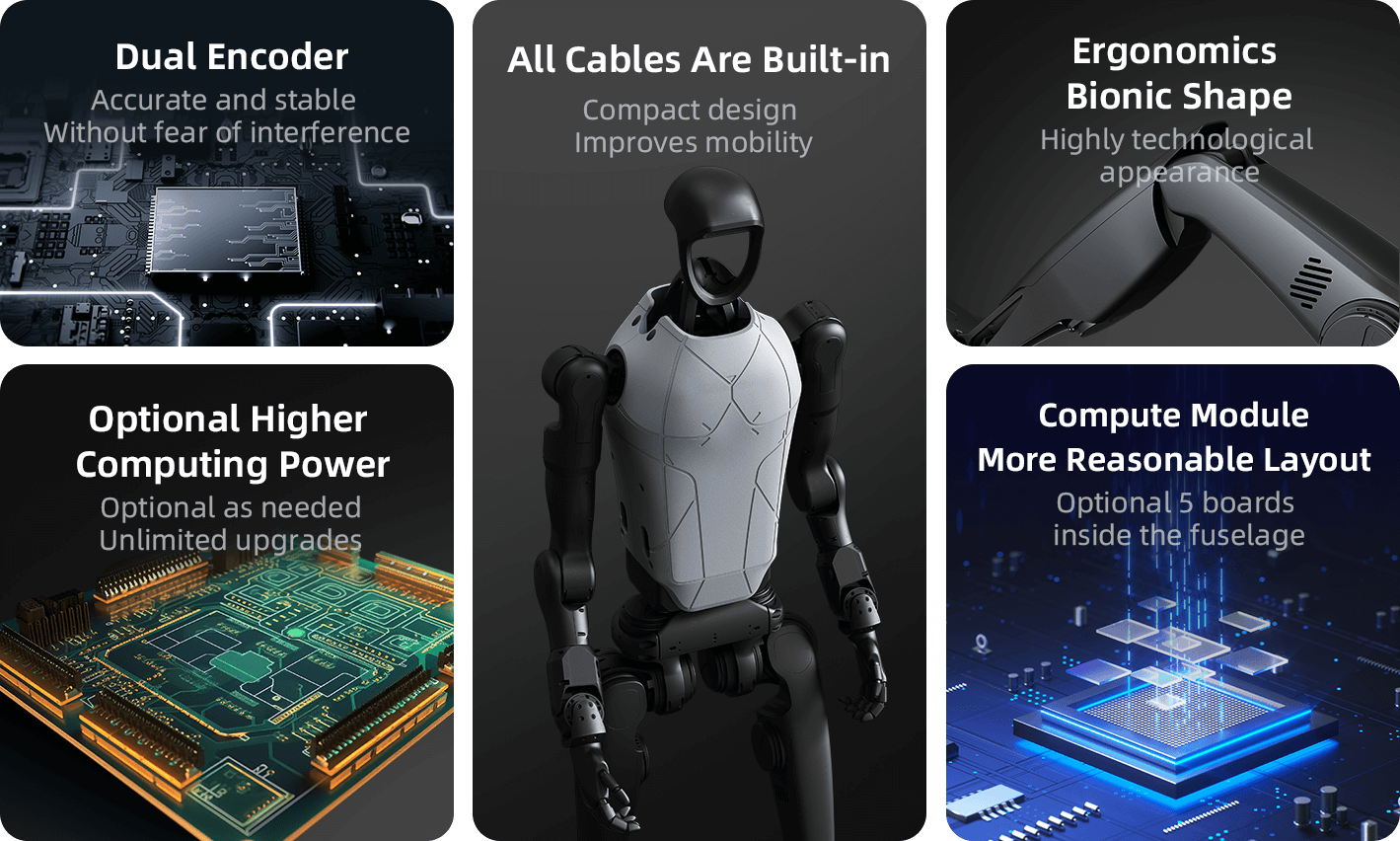
| Dual Encoder | YES | YES | YES |
| Dimensions (mm) | 107 × 74 | 100 × 130 | 60 × 180 |

Pronto per il Futuro?
H1 e H1-2 rappresentano l'avanguardia della robotica umanoide.
Pronto per il Futuro?
H1 e H1-2 rappresentano l'avanguardia della robotica umanoide. Unisciti alla rivoluzione della ricerca e dello sviluppo.
Unitree H1 Parameter
Riepilogo specifiche principali dei modelli H1 e H1-2
| Parametro | H1 | H1-2 |
|---|---|---|
| Altezza | 180 cm | 178 cm |
| Peso | 47 kg | 70 kg |
| Velocità record | 3.3 m/s | — |
| Mobilità max | 5 m/s+ | 5 m/s+ |
| Torque max | 360 N.m | — |
| DOF gambe / totali | 10 / — | — / 27 |
| Torque max braccio | — | 120 N.m |
Nota: valori indicativi raccolti dalla pagina e dai materiali locali. Alcuni campi potrebbero richiedere conferma ufficiale.
M107 PK International mainstream joint motor
Confronto sintetico del giunto M107 rispetto ai motori mainstream
| Parametro | M107 | Mainstream |
|---|---|---|
| Tipo | Giunto robotico ad alte prestazioni | — |
| Coppia massima | — | — |
| Densità di coppia | 189 N.m/kg (robot) | — |
| Efficienza / dissipazione | Ottimizzata | — |
| Applicazione | Unitree H1 / H1-2 | — |
Campi "-" in attesa di specifiche ufficiali. Possiamo importarli se fornisci la tabella originale o un link.

Pronto per il Futuro?
H1 e H1-2 rappresentano l'avanguardia della robotica umanoide.