
Nel 2026 il problema non è più capire se robot e AMR possano lavorare in fabbrica. Il problema vero è farli lavorare bene nello stesso spazio, senza trasformare ogni incrocio, pallet alto o angolo cieco in un compromesso tra produttività e rischio.
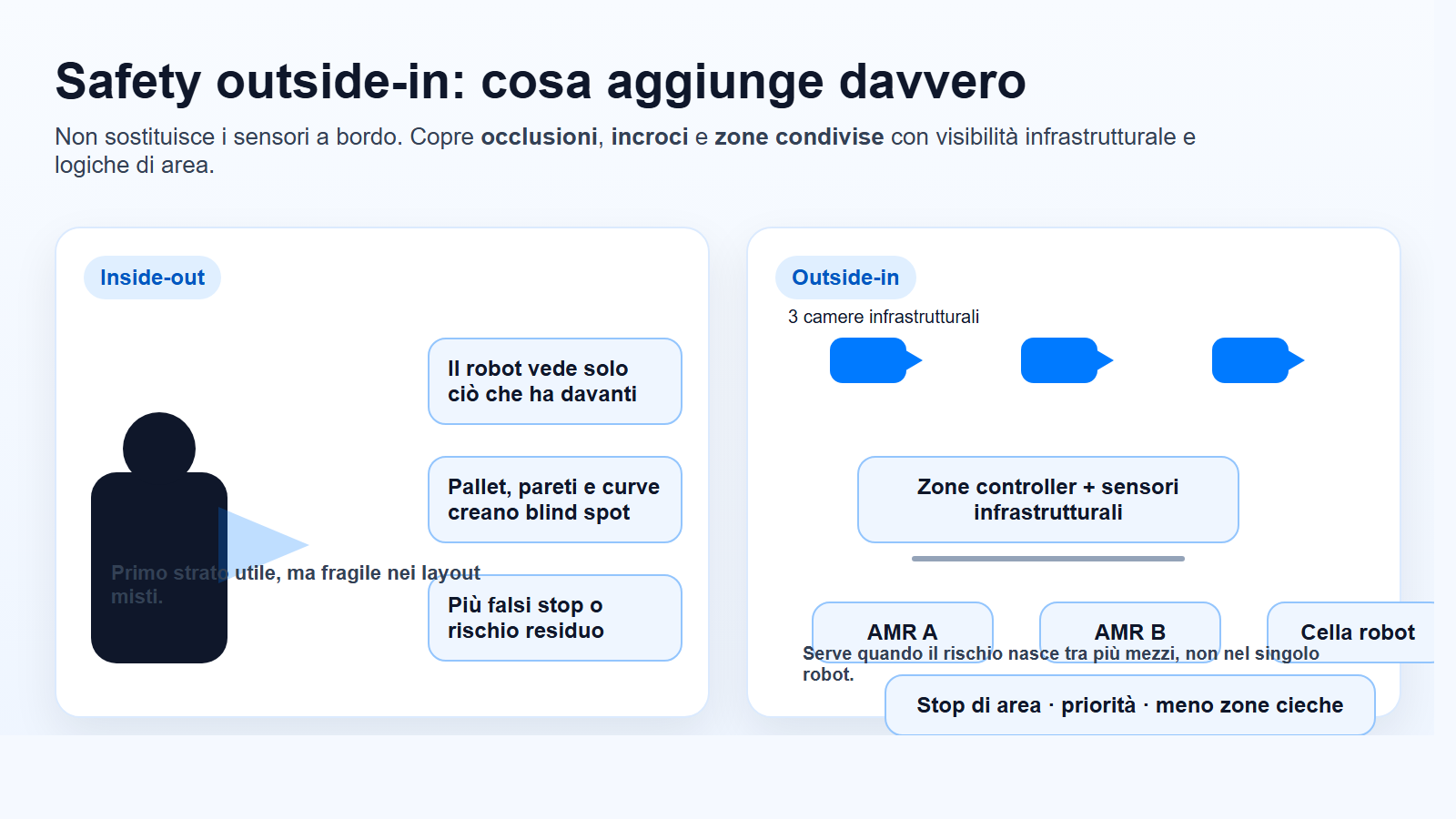
È qui che entra la safety outside-in: un approccio in cui parte dell’intelligenza di sicurezza non resta solo a bordo macchina, ma viene distribuita nell’ambiente tramite camere, sensori infrastrutturali, controller certificabili e logiche di arresto coordinate. Tradotto: meno fede cieca nel singolo sensore onboard, più visibilità reale sui punti che un robot da solo non vede.
In sintesi: la novità non è “un altro strato software”, ma un cambio di architettura. Secondo Automation World, il nuovo sistema edge AI MIC-735 di Advantech nasce proprio per unire calcolo AI, sincronizzazione sensori e safety architecture di Fort Robotics. NVIDIA, sul fronte use case, spinge la stessa idea con agenti di safety outside-in per magazzini e linee condivise. Per chi gestisce layout con movimentazioni interne o stazioni di asservimento macchine, è un tema che smette di essere futuribile e diventa operativo.
Perché la safety classica non basta più
Il punto di partenza è semplice: la safety inside-out continua a essere fondamentale. Sensori onboard, lidar, camere e logiche locali restano la prima barriera di protezione. Ma appena il layout si complica, emergono i limiti pratici.
Un AMR non vede oltre una scaffalatura. Un cobot non anticipa quello che accade dietro una parete o dietro un carico sporgente. Un robot mobile in corsia può rispettare tutte le distanze minime previste, ma trovarsi comunque cieco in prossimità di una curva, di un portone o di una zona di handoff.
Il materiale pubblicato da NVIDIA lo dice in modo netto: l’outside-in serve proprio a coprire occlusioni, blind spot e aree dinamiche che i sensori a bordo non riescono a monitorare con continuità. L’effetto pratico non è solo più sicurezza. È anche meno rallentamenti inutili.

Secondo ABI Research, citata da PR Newswire, il 53% dei produttori è nelle prime fasi di adozione di nuovi robot industriali e il 28% li ha già in stabilimento. Le due barriere principali restano competenze e tempo di implementazione. È esattamente il terreno in cui una safety progettata male brucia ROI: non perché manchino i robot, ma perché il layout condiviso diventa fragile.
Cosa cambia con la safety outside-in
La differenza non è filosofica. È architetturale.
Nel caso descritto da Automation World, Advantech combina il modulo NVIDIA IGX T5000 con l’architettura safety di Fort Robotics per offrire una piattaforma edge in grado di gestire inferenza AI, sincronizzazione sensori e controllo affidabile. Fort entra nel disegno con componenti come Endpoint Controller e Nano Safety Controller Pro, pensati per instradare comandi safety e logiche e-stop su reti IP o radio in modo deterministico.
Questo consente tre cose che in impianto contano davvero:
1) Vedere oltre il robot
Le camere infrastrutturali o i sensori ambientali possono creare una vista estesa della zona di lavoro. NVIDIA la chiama prospettiva a 365°, utile soprattutto in magazzini, baie di carico, incroci e trailer loading.
2) Governare più mezzi con una sola logica
Se il rischio è nell’area e non nel singolo robot, anche la safety deve ragionare per area. Un’infrastruttura outside-in può rallentare, deviare o fermare più AMR insieme quando una zona entra in stato critico.
3) Ridurre i falsi stop
Un robot troppo prudente non è “più sicuro”: spesso è solo meno produttivo. Se l’outside-in distingue meglio presenza reale, direzione del traffico e zone libere, il risultato è meno arresti inutili e throughput più alto.
Il framework pratico per valutare un progetto
Quando un fornitore ti parla di AI safety, conviene uscire subito dallo storytelling e mettere quattro criteri sul tavolo.
- Copertura delle occlusioni: quali zone cieche vengono coperte da sensori infrastrutturali e con che granularità?
- Tempo di reazione end-to-end: il tempo utile va misurato dal rilevamento all’azione, non solo sul sensore.
- Fail-safe e comandi di arresto: la logica safety regge anche con perdita parziale di connettività o sensore degradato?
- Governance multi-robot: la piattaforma sa gestire priorità e arresti per area, non solo per singola macchina?
In ambienti dove convivono AMR, isole robotiche e operatori, questo approccio si sposa bene con un lavoro serio di layout, traffico e handoff. È la stessa logica con cui vanno lette soluzioni di movimentazione interna o celle miste di assemblaggio: la scelta non è il robot “più intelligente” in astratto, ma l’architettura che tiene in piedi il processo.
KPI minimi da chiedere prima di partire
Questa è la parte da non saltare in riunione tecnica. Se mancano questi numeri, non stai ancora valutando la safety outside-in: stai ascoltando una demo.
| Criterio | Benchmark da chiedere | Perché conta |
|---|---|---|
| Zone cieche mappate | Elenco puntuale con planimetria | Senza mappa, l’outside-in resta teoria |
| Tempo rilevamento → azione | Misura end-to-end in millisecondi | È il dato che separa analytics da safety reale |
| Gestione perdita sensore | Modalità degradata documentata | Una safety buona non crolla al primo nodo assente |
| E-stop di area | Test su più mezzi e più scenari | Nei layout condivisi il rischio è spesso collettivo |
| Falsi stop per turno | Baseline prima/dopo pilot | Se non cala questo numero, il ROI resta zoppo |
| Ownership dati video | Policy chiara | Le camere infrastrutturali aprono anche un tema governance |
Il punto business è qui: una safety outside-in ben progettata può aumentare il numero di ore realmente produttive, non solo migliorare la checklist HSE. Se invece aggiunge complessità non governata, diventa un costo elegante.
Dove ha senso partire davvero
Ci sono almeno tre scenari in cui l’outside-in merita un pilot serio già oggi.
Primo: magazzini o reparti con traffico AMR e incroci ad alta variabilità.
Secondo: baie di carico, trailer loading, handoff tra operatori e robot.
Terzo: impianti brownfield dove non puoi ridisegnare tutto il layout ma puoi aggiungere visibilità e logiche infrastrutturali.
In questi casi la promessa non è eliminare il rischio. È renderlo più leggibile e più governabile. E questo, in automazione, è già un salto notevole.
La parte interessante è che la tecnologia edge sta finalmente parlando la lingua dell’impianto: temperature industriali, sensor fusion, networking robusto, integrazione con stack AI e controller safety. Non siamo più nel territorio delle demo “wow”. Siamo nel territorio dei pilot che o reggono ai turni, oppure non passano.
Conclusione
La safety outside-in non sostituisce la safety tradizionale: la completa dove il mondo reale si complica. Più il layout è misto, più questa distinzione diventa decisiva.
Nel 2026 la domanda giusta non è se usare più AI nella safety, ma dove metterla e con quali responsabilità architetturali. Se il tuo impianto ha blind spot, handoff delicati o traffico robotico crescente, conviene partire da lì e non dal catalogo. Se vuoi ragionare su un pilot concreto per corsie, celle o zone condivise, parla con il team Bubbles: meglio una planimetria onesta oggi che una frenata sbagliata domani.
Fonti
- Automation World, Advantech Releases Edge AI Inference System: https://www.automationworld.com/control/news/55368663/advantech-releases-edge-ai-inference-system
- NVIDIA, Safe AI Automation and Robot Safety for Industrial Operations: https://www.nvidia.com/en-us/use-cases/functional-safety-ai-agents-industrial-robots/
- FORT Robotics, Industrial Machine Automation Solutions: https://www.fortrobotics.com/products
- PR Newswire / ABI Research, Survey Reveals 53% of Manufacturers Embracing Industrial Robots for Quality Improvement: https://www.prnewswire.com/news-releases/survey-reveals-53-of-manufacturers-embracing-industrial-robots-for-quality-improvement-302459983.html
Serve supporto per applicare queste idee?
Il team Bubbles Technology progetta soluzioni robotiche su misura per PMI in Campania e in tutta Italia. Prenota una consulenza gratuita per discutere esigenze, ROI e roadmap.