
Quando si parla di robotica nucleare, il rischio è immaginare un solo problema: serve un robot molto resistente e il gioco è fatto. Le fonti degli ultimi giorni raccontano una realtà più scomoda e più interessante. Nel decommissioning, il collo di bottiglia non è soltanto il manipolatore. Spesso è il sistema che tiene insieme comunicazioni, sensing, recovery e prova in dose.
In sintesi: IEEE Spectrum ha raccontato un ricevitore Wi-Fi capace di resistere a 500 kilogray, mentre un lavoro pubblicato su Frontiers in Robotics and AI mostra test dinamici su un braccio industriale esposto a 10 Gy/h. Messa accanto alla cornice IAEA sul decommissioning e al dato citato da IEEE secondo cui oltre 200 reattori arriveranno a fine vita nei prossimi vent'anni, la lezione è chiara: il vero salto non è il robot "eroico", ma la missione remota progettata per sopravvivere all'ambiente.
Perché il collo di bottiglia non è solo il braccio robotico
L'IAEA definisce il decommissioning come un processo tecnico e amministrativo che comprende caratterizzazione radiologica, decontaminazione, smantellamento e gestione dei materiali. Tradotto per chi progetta automazione: non basta far entrare un robot in una zona ostile, bisogna anche assicurare che raccolga dati utili, completi il task e torni gestibile quando qualcosa si degrada.
Qui la notizia IEEE è rilevante perché sposta l'attenzione su un layer spesso sottovalutato: il collegamento. Il gruppo dell'Institute of Science Tokyo ha presentato un ricevitore Wi-Fi a 2,4 GHz capace di reggere una dose totale di 500 kGy, un ordine di grandezza che va ben oltre le tolleranze tipiche dell'elettronica impiegata in contesti molto meno estremi. Non è ancora la soluzione completa del problema, anche perché il trasmettitore resta la parte più difficile, ma il messaggio è forte: nel nucleare il link radio non è un optional, è parte della safety case.
Per chi lavora già su ispezione e sorveglianza, il parallelismo è utile. Anche fuori dal nucleare, nei contesti harsh environment il valore non sta nel "mandare dentro un robot" e basta, ma nel garantire continuità di comunicazione, telemetria e fallback operativo.
Cosa insegnano davvero i test in radiazione
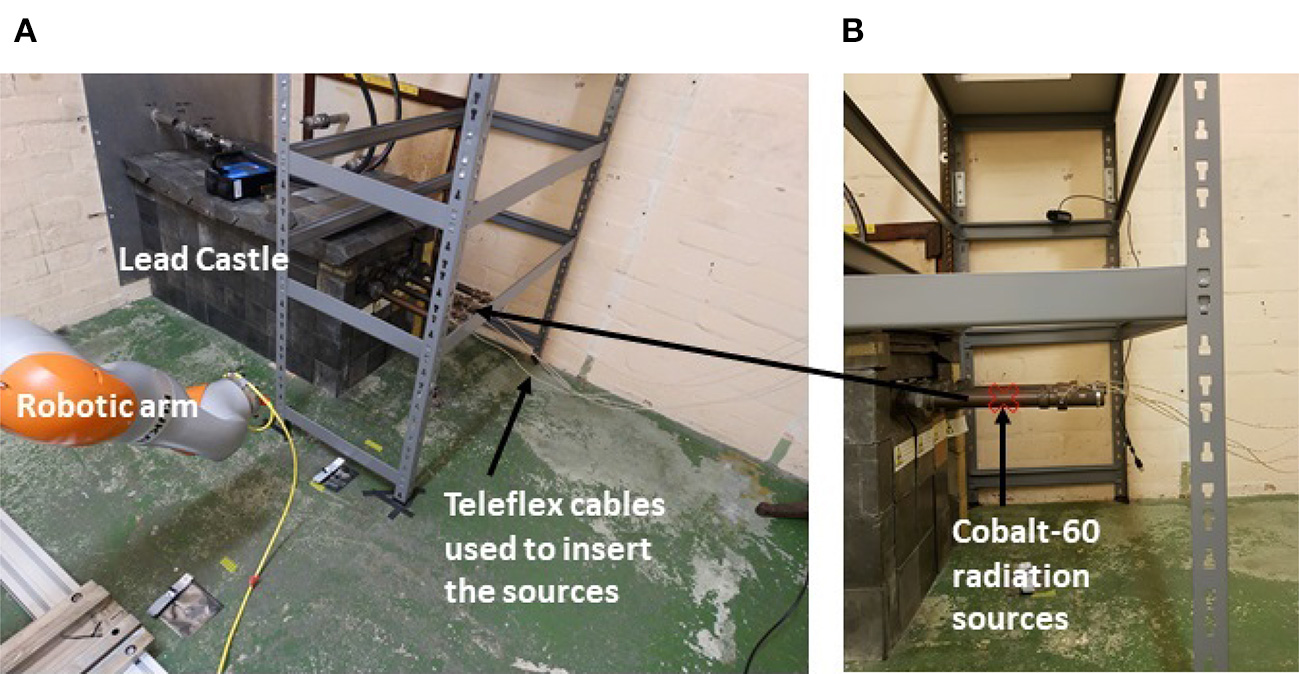
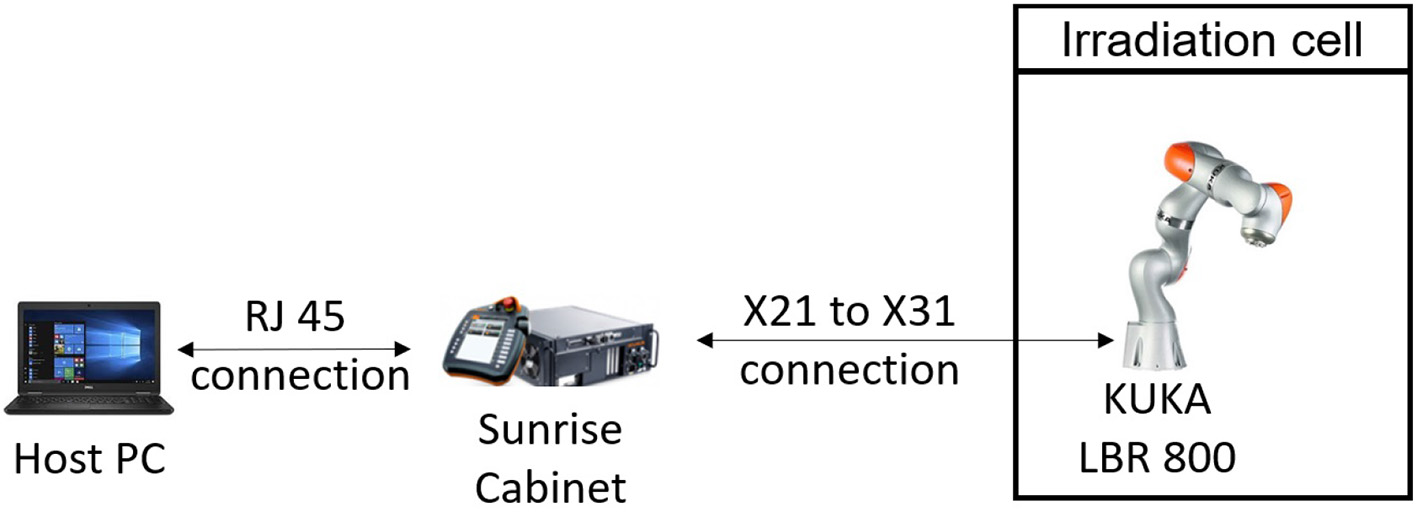
Il paper su Frontiers è prezioso perché abbassa il volume della retorica e alza quello del metodo. I ricercatori hanno testato un braccio KUKA iiwa LBR800 in condizioni dinamiche, non come semplice componente fermo su banco. L'idea è semplice e molto B2B: un robot non serve se "resiste" in astratto ma fallisce mentre esegue una traiettoria reale.
Il test è stato condotto con un'esposizione di 10 Gy/h per simulare condizioni presenti nelle attività più critiche di nuclear waste handling. L'articolo insiste su un punto che nel manifatturiero conosciamo bene: i sistemi off-the-shelf possono accelerare la disponibilità di soluzioni, ma vanno qualificati sul mission profile reale. Nel nucleare questo significa capire in anticipo quali componenti degradano per primi, quali moduli vale la pena schermare e quali invece conviene trattare come elementi sostituibili.
È anche un modo utile per leggere la paura storica del settore. Dopo Fukushima, molti operatori hanno interiorizzato l'idea che "l'elettronica moderna non possa convivere con la radiazione". Le fonti tecniche dicono una cosa più precisa: in alcuni scenari estremi il fallimento arriva in fretta, ma in molti altri è possibile ottenere lavoro utile se dose, durata, architettura e recovery vengono progettati con disciplina.
Dove la robotica può entrare davvero nel decommissioning
La domanda pratica non è se vedremo robot ovunque nei siti nucleari. La domanda utile è in quali task il ritorno di safety e dati è già abbastanza chiaro. Le fonti convergono su quattro famiglie di attività:
- ispezione e caratterizzazione radiologica;
- telemanipolazione e handling remoto di materiali;
- taglio e smantellamento in zone ad alto rischio;
- raccolta dati per pianificare interventi umani più mirati.
Qui il decommissioning assomiglia più di quanto sembri a certi scenari industriali mission-critical: prima si manda il robot a leggere l'ambiente, poi si decide quanto esporre persone, tempi e capitale. È la stessa logica con cui piattaforme robuste per ambienti complessi, dai quadrupedi come Unitree B2-W a sistemi remoti per ispezione e sorveglianza, vengono valutate non per spettacolo ma per riduzione del rischio operativo.
Il punto, però, è non confondere analogia e promessa commerciale. Un robot nucleare non è semplicemente un quadrupede industriale "più duro". Servono protocolli, test in dose, validazione regolatoria e una governance del failure mode molto più severa.

La checklist da fare prima di qualsiasi pilot serio
Se un'azienda o un integratore vuole entrare in questo spazio, noi partiremmo da quattro domande molto sobrie:
- Qual è la dose attesa lungo l'intera missione e non solo nel punto peggiore?
- Quale componente fallisce prima: sensore, link, attuatore o controllo?
- Esiste una strategia di recovery se la comunicazione si degrada?
- Il robot sta sostituendo davvero un'esposizione umana o sta solo aggiungendo complessità?
È qui che si separano i prototipi che sembrano convincenti in laboratorio dai sistemi che possono affrontare un procurement serio. Nel nucleare, più che altrove, i progetti buoni non sono quelli che promettono tutto: sono quelli che delimitano bene cosa possono fare, per quanto tempo e con quale margine di sicurezza.
Conclusione
La robotica nucleare nel 2026 non è fantascienza, ma nemmeno una categoria pronta a vivere di demo isolate. Le fonti di oggi ci ricordano che il vantaggio nasce quando il robot, il collegamento e il piano di decommissioning vengono pensati come un unico sistema. Un ricevitore che regge 500 kGy è un segnale forte. Un braccio testato in dose durante compiti reali è un altro passo utile. La vera maturità arriverà quando questi pezzi si incontreranno dentro missioni remote che reggono davvero anche nel giorno peggiore.
Se vuoi ragionare su come tradurre questa logica in progetti di ispezione e sorveglianza o in roadmap robotiche per ambienti complessi, possiamo aiutarti a partire da requisiti, failure mode e casi d'uso reali: contattaci.
Fonti
- IEEE Spectrum, Radiation-Hardened Wi-Fi for Robotics in Nuclear Industry: https://spectrum.ieee.org/robotics-in-nuclear-industry
- IAEA, Decommissioning of nuclear installations: https://www.iaea.org/topics/decommissioning
- Frontiers in Robotics and AI, Radiation Tolerance Testing Methodology of Robotic Manipulator Prior to Nuclear Waste Handling: https://www.frontiersin.org/journals/robotics-and-ai/articles/10.3389/frobt.2020.00006/full
Serve supporto per applicare queste idee?
Il team Bubbles Technology progetta soluzioni robotiche su misura per PMI in Campania e in tutta Italia. Prenota una consulenza gratuita per discutere esigenze, ROI e roadmap.