

A volte un titolo accademico sembra scritto per vincere Internet. Robot Squid Game: Quadrupedal Locomotion for Traversing Narrow Tunnels è uno di quei casi. La battuta però dura poco, perché dietro c'è un problema che riguarda miniere, sottoservizi, impianti industriali, tunnel, caverne e strutture collassate: come mandi un robot dove lo spazio è troppo stretto, irregolare o rischioso per una persona?
Il paper, pubblicato su arXiv il 13 maggio 2026, propone un framework di reinforcement learning per far attraversare ai quadrupedi ambienti 3D confinati. Non è la solita camminata spettacolare su terreno accidentato. Qui il robot deve piegarsi, adattare il passo, gestire pareti vicine e scegliere movimenti che in uno spazio aperto non servirebbero mai.
In sintesi
Il lavoro combina generazione procedurale di tunnel, policy specializzate e distillazione teacher-student. In pratica, il robot impara da molti “maestri” addestrati su geometrie diverse e trasferisce quelle strategie in una policy più generale. La promessa: attraversare tunnel complessi dove gait rigide e assunzioni troppo semplici falliscono.
Perché i tunnel sono difficili per un robot cane
Un quadrupede come Unitree B2 o Unitree Go2 nasce per muoversi su terreni variabili, ma un tunnel stretto cambia le regole. Non basta mantenere equilibrio e trazione. Bisogna capire quanto spazio resta sopra, di lato e davanti; evitare che una zampa tocchi la parete nel momento sbagliato; avanzare anche quando la postura ideale non è disponibile.
Le gait standard funzionano bene finché l'ambiente lascia libertà. In una condotta o in un varco basso, quella libertà sparisce. Il robot può dover procedere accovacciato, ruotare il corpo, ridurre l'ampiezza del passo o accettare movimenti meno eleganti ma più robusti. È qui che il nome “Squid Game” diventa meno frivolo: ogni passaggio è una prova di adattamento.
Per chi fa ispezione e sorveglianza, la domanda non è se il robot è bello da vedere. È se torna indietro con dati utili senza trasformare una missione di sicurezza in una missione di recupero del robot.

La parte interessante: molti maestri, uno studente
Il paper descrive una logica teacher-student. Invece di chiedere a un unico modello di imparare da zero tutti i tunnel possibili, si addestrano policy esperte su configurazioni specifiche generate proceduralmente. Poi la conoscenza viene distillata in una policy unificata.
È un approccio molto industriale, anche se nasce in ricerca. Quando un problema è troppo complesso, lo scomponi: curve, restringimenti, altezze diverse, sezioni irregolari, cambi di pendenza. Ogni specialista impara una parte. Lo studente finale impara a scegliere comportamenti robusti senza dover ricevere un reward costruito a mano per ogni dettaglio.
Dalla demo al lavoro: cosa cambia per le aziende
In un impianto reale, il robot quadrupede non deve solo camminare. Deve portare sensori, comunicare, illuminare, registrare video, localizzarsi e fermarsi in sicurezza. In un tunnel, ogni requisito peggiora: radio più debole, polvere, umidità, superfici scivolose, ostacoli non mappati e pochissimo spazio per manovrare.
Per questo l'addestramento locomotorio è solo un pezzo della catena. Serve una missione completa:
- sopralluogo e mappa dei vincoli fisici;
- scelta del payload, dalla termocamera al lidar;
- piano di comunicazione o relay radio;
- procedura di recupero se il robot si blocca;
- soglie chiare tra autonomia, teleoperazione e stop;
- verifica che i dati raccolti siano davvero leggibili.
Un quadrupede che attraversa un varco impossibile è affascinante. Un quadrupede che attraversa il varco, misura, documenta e rientra è un asset operativo.

Il paradosso dei robot “meno eroici”
Il video virale vorrebbe il robot che supera ogni ostacolo da solo. La versione utile è più umile: un robot che sa quando rallentare, quando chiedere teleoperazione e quando non entrare. In ambienti confinati, l'autonomia totale non è sempre la scelta più sicura. Spesso il valore sta nel combinare una buona locomozione con supervisione umana e procedure ripetibili.
Per Bubbles questo conta perché i quadrupedi industriali stanno uscendo dal ruolo di “robot da demo”. Un Unitree B2-W può essere interessante per ispezioni dove ruote e gambe hanno vantaggi diversi; un B2 standard può essere adatto quando autonomia, stabilità e payload contano più della velocità scenica. Dove invece il vincolo è aderenza su acciaio o superfici verticali, il confronto va fatto anche con soluzioni più specializzate come il robot magnetico per ispezione dell'acciaio. Nessun robot va venduto come bacchetta magica: la missione va progettata attorno al luogo.
Conclusione
Robot Squid Game funziona come titolo perché è memorabile. Funziona come ricerca perché prende sul serio un pezzo scomodo della robotica: i robot non lavorano nei rendering, lavorano nei passaggi brutti.
Se dobbiamo mandare macchine in tunnel, sottoservizi o aree rischiose, il criterio non è il video più spettacolare. È una domanda più concreta: il robot riesce a entrare, capire, raccogliere dati e uscire senza aumentare il rischio? Se vuoi valutare una missione con quadrupedi per ispezione, scrivici: prima guardiamo il tunnel, poi scegliamo il robot.
Fonti consultate
Articoli correlati
Vedi tutti →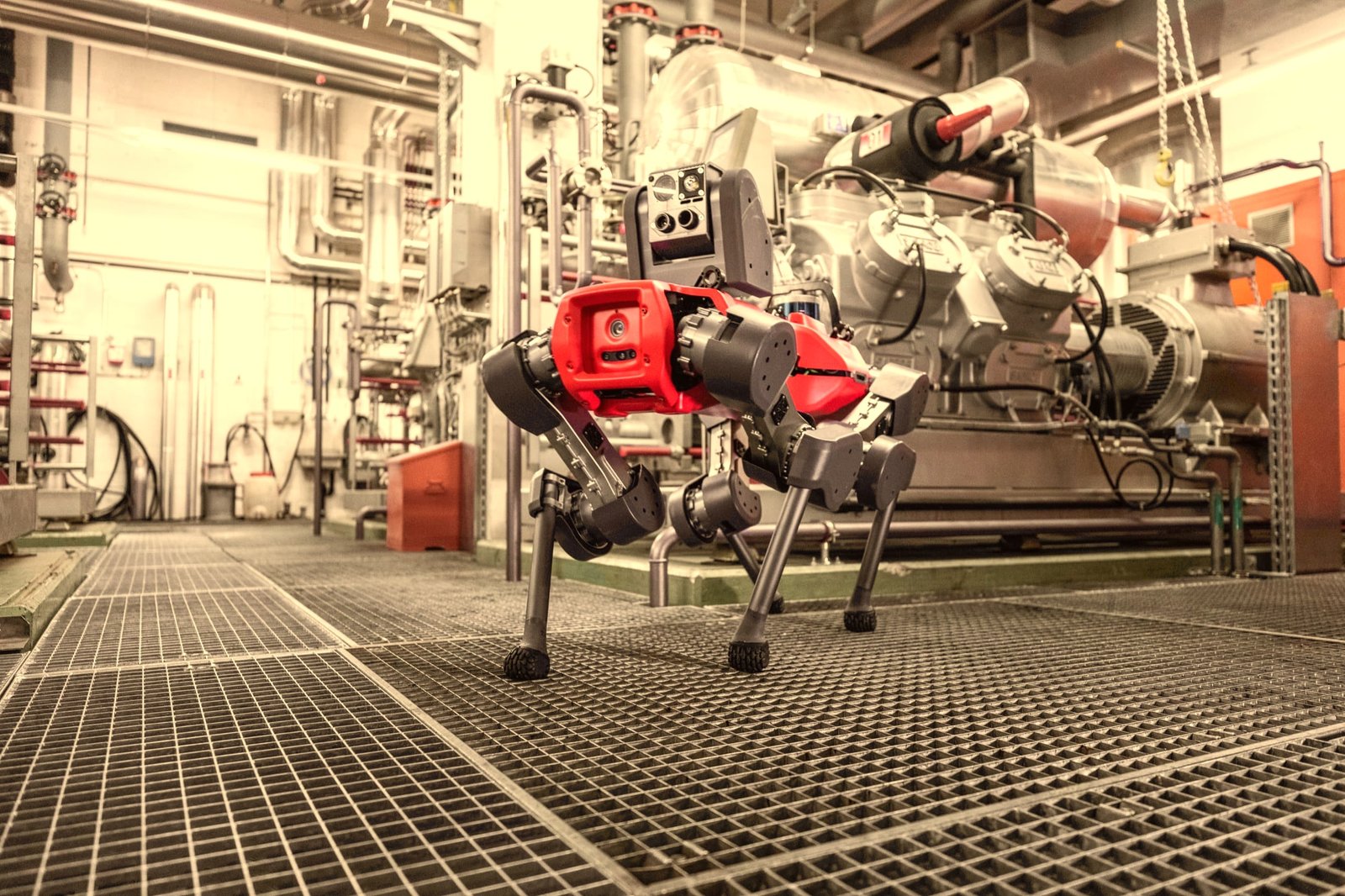
GE Vernova compra Robotech: la robotica entra nei servizi energia
Atlas sposta un frigorifero: il punto non è la forza

Droni e robot per ispezione industriale: il dato conta
Serve supporto per applicare queste idee?
Il team Bubbles Technology progetta soluzioni robotiche su misura per PMI in Campania e in tutta Italia. Prenota una consulenza gratuita per discutere esigenze, ROI e roadmap.