

Un robot che cucina un pasto in 20 passaggi è il tipo di immagine che fa fermare lo scroll. Pomodori, uova, due mani coordinate, oggetti che scivolano meno di quanto ci aspetteremmo. Genesis AI ha presentato GENE-26.5 con una promessa ambiziosa: portare la manipolazione robotica verso capacità fisiche molto più vicine a quelle umane.
The Robot Report racconta una lista di dimostrazioni pensata per colpire: cucinare, preparare uno smoothie, pipettare in laboratorio, organizzare cablaggi, risolvere un cubo di Rubik, afferrare più oggetti con una mano e persino suonare il piano. Ma il punto non è stabilire se il robot sia “quasi umano”. Il punto è più interessante: la destrezza non nasce dal video finale. Nasce da dati, embodiment e hardware progettati per trasferire abilità umane in modo meno goffo.
Genesis AI parla di un foundation model robotico, una mano human-scale e un guanto con electronic skin tattile. In altre parole: non solo cervello, non solo mano, non solo teleoperazione. Un sistema completo per catturare come le persone usano le dita e trasformarlo in competenza fisica.
In sintesi
GENE-26.5 non conta perché “cucina”: conta perché prova a trasformare dati umani, sensori tattili e mani robotiche in manipolazione più robusta. Per un'azienda il punto pratico è mappare task manuali variabili — cablaggi, micro-assembly, laboratorio, packaging — e capire se partire da assemblaggio, cobot con end-effector dedicati o piattaforme di robot umanoidi per test di physical AI.

Perché cucinare è più difficile di quanto sembri
Cucinare mette insieme quasi tutto ciò che i robot odiano: oggetti deformabili, superfici scivolose, utensili diversi, forza variabile, sequenze lunghe e piccoli errori che si accumulano. Un braccio industriale tradizionale eccelle quando il mondo è ordinato. In cucina il mondo cambia ogni secondo.
Per questo il video non va letto come “domani avremo chef robotici ovunque”. Va letto come test di coordinazione: una mano tiene, l'altra taglia; una versa, l'altra stabilizza; una corregge, l'altra prepara il passaggio successivo. È la differenza tra muovere un asse e manipolare davvero.
La stessa frontiera interessa anche la manifattura. Nei progetti di assemblaggio e scarico-carico, il collo di bottiglia non è sempre la velocità del robot. Spesso è la capacità di gestire pezzi non perfettamente allineati, cavi, guarnizioni, blister, viti, componenti morbidi o confezioni leggere.
La mano conta quanto il modello
La frase più importante della notizia non riguarda il pasto. Riguarda il “gap di embodiment”: la differenza tra il corpo umano e il corpo del robot. Se una mano robotica non assomiglia abbastanza a una mano umana, i dati raccolti da persone diventano più difficili da trasferire. Genesis AI prova a ridurre questo scarto con una mano robotica in scala umana e un glove che mappa il gesto umano verso la mano del robot.
È un passaggio cruciale. La physical AI non può limitarsi a guardare video su internet e sperare che il movimento venga fuori. Deve capire contatto, pressione, attrito, micro-correzioni. Una persona non “calcola” ogni volta come prendere un uovo: sente, corregge, anticipa. Per un robot, quella naturalezza è un lavoro ingegneristico enorme.
Dove può arrivare prima: laboratorio, elettronica, qualità
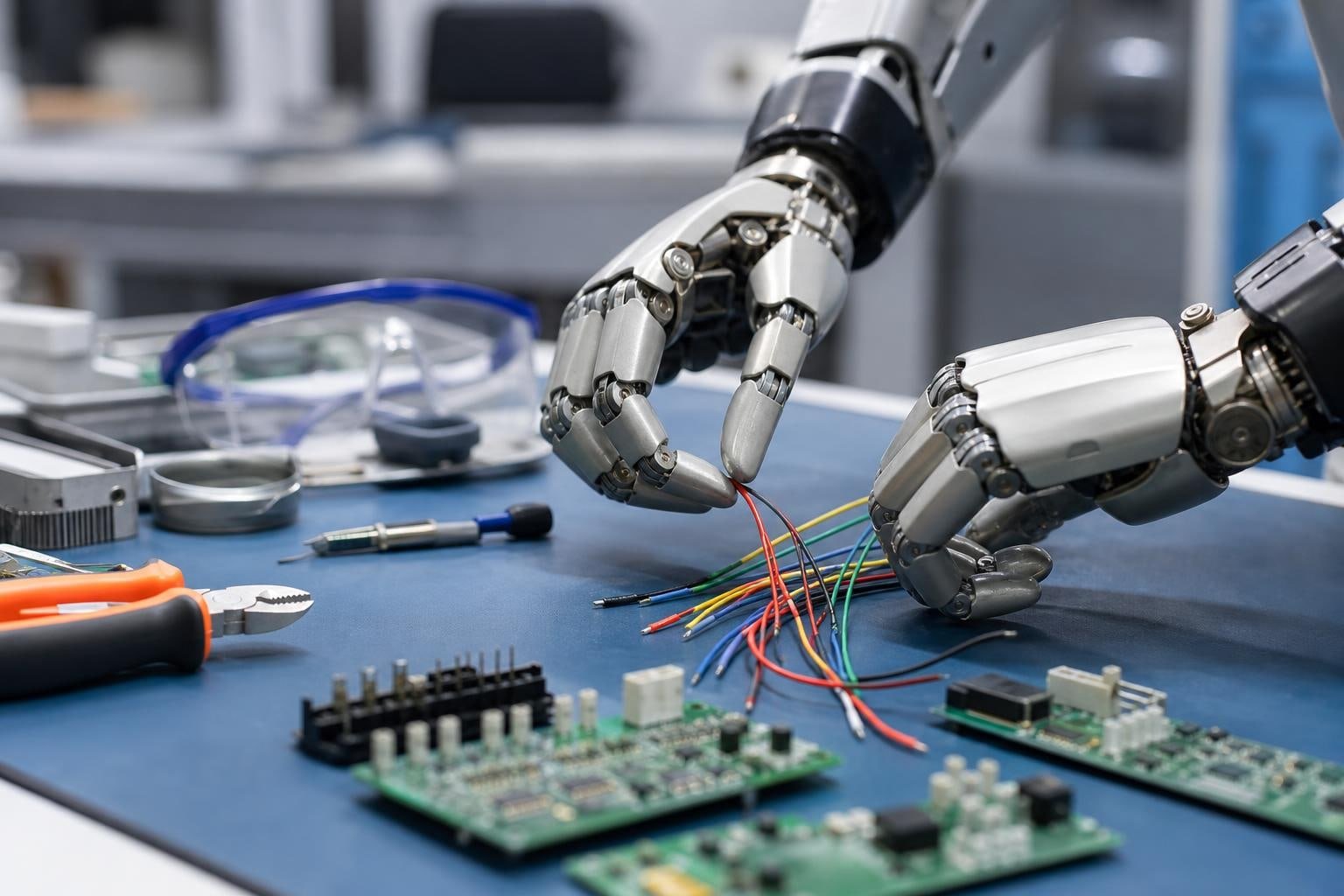
Il robot chef è perfetto per il pubblico. Ma i primi casi seri potrebbero essere meno televisivi e molto più utili. Genesis cita il pipettaggio e il wire harnessing: due esempi che parlano a laboratori, elettronica e produzione high-mix.
Nel pipettaggio servono precisione, ripetibilità e attenzione a strumenti delicati. Nei cablaggi servono mani che sappiano orientare fili, mantenere tensione, infilare, ordinare e verificare. Sono task dove la manipolazione è ancora spesso manuale perché il costo di automazione tradizionale cresce rapidamente.
Qui il collegamento con le PMI è evidente. Un Dobot CR10 può essere la base meccanica di una cella utile, ma la vera differenza arriva dall'end-effector, dalla visione, dalla procedura e dai dati raccolti durante l'uso. Se il pezzo cambia ogni giorno, il robot deve imparare più di una traiettoria.
Il rischio: confondere destrezza con autonomia pronta
GENE-26.5 è una notizia importante, ma va letta con prudenza. Una demo selezionata non è una garanzia di produzione 24/7. Le domande decisive restano: quante volte riesce il task? quanto tempo richiede il reset? cosa succede con oggetti leggermente diversi? chi gestisce la sicurezza se il robot lavora vicino a persone? quanto costa raccogliere dati utili?
Genesis dichiara che il glove può essere 100 volte più economico dell'hardware tipico e fino a 5 volte più efficiente nella raccolta dati in test interni. Sono numeri interessanti, ma da validare sul campo. La direzione, però, è chiara: la robotica generale non scalerà solo con modelli più grandi. Scalerà quando raccogliere dati fisici diventerà meno costoso, più continuo e più vicino al lavoro reale.
Per questo gli umanoidi Unitree e i robot collaborativi non vanno valutati come “personaggi” futuristici. Vanno valutati come piattaforme fisiche: mani, sensori, sicurezza, autonomia, manutenzione, tool, integrazione.
Conclusione
Il robot che cucina è la copertina. La notizia vera è la mano che impara. Se Genesis AI riuscirà a trasformare dati umani, guanti tattili e simulazione in abilità affidabili, la manipolazione robotica potrebbe uscire da una nicchia di task rigidissimi e affrontare lavori più variabili.
Per ora, la domanda giusta non è “quando cucinerà per noi?”. È “quali compiti manuali ripetitivi nella mia azienda assomigliano abbastanza a questa destrezza da meritare un pilot?”. La risposta spesso non sta in cucina: sta in laboratorio, assemblaggio, cablaggi, packaging e controllo qualità. Se vuoi capire quali task sono candidati reali, partiamo da una mappa dei gesti, non da un video demo.
Fonti consultate
Articoli correlati
Vedi tutti →
Materiali deformabili: il test vero della physical AI

Robot e tatto: perché le dita sensorizzate cambiano tutto

Robotica Italia 2028: la checklist per le PMI che vogliono investire bene
Serve supporto per applicare queste idee?
Il team Bubbles Technology progetta soluzioni robotiche su misura per PMI in Campania e in tutta Italia. Prenota una consulenza gratuita per discutere esigenze, ROI e roadmap.